XiaoMi-AI文件搜索系统
World File Search System概括的

Unitraj:可扩展车辆轨迹预测的统一框架
摘要。车辆轨迹预测越来越依赖于数据驱动的解决方案,但是它们扩展到不同数据域的能力以及较大数据集大小对其概括的影响仍然不足。虽然可以通过使用多个数据集来研究这些问题,但由于几个差异,例如,在数据for-mats,MAP分辨率和语义注释类型中,这是具有挑战性的。为了应对这些挑战,我们介绍了Unitraj,这是一个综合框架,该框架统一了各种数据集,模型和评估标准,为车辆轨迹预测字段提供了新的机会。特别是,使用Unitraj,我们进行了广泛的实验,并发现当转移到其他数据集时,模型的模型显着下降。但是,扩大数据大小和多样性可以大大提高性能,从而导致Nuscenes数据集的最新结果。我们对数据集特征提供了见解,以解释这些发现。代码可以在此处找到:https://github.com/vita-epfl/unitraj。

通过大语言模型探索零拍的跨语性生物医学概念归一化
摘要。在过去的几年中,歧视性和生成性的大语言模型(LLM)已成为自然语言处理的主要方法。,尽管取得了重大进步,但在比较跨语性生物医学概念归一化中判别和生成性LLM的性能仍然存在差距。在本文中,我们对几个LLM进行了比较研究,涉及跨语言生物医学概念通过致密检索的具有挑战性的任务。我们利用涵盖10种语言的XL-BEL数据集来评估模型在不进一步适应的情况下在各种语言环境中概括的能力。实验发现表明,E5是一种判别模型,表现出卓越的性能,而生物分类出现为表现最佳的生成LLM。复制实验的代码可在以下网址提供:https://github.com/hrouhizadeh/zsh_cl_bcn。

dexgraspnet 2.0:在大规模合成的杂物场景中学习生成灵巧的抓握
摘要 - 由于数据稀缺,在混乱的场景中挖掘仍然是灵巧的手。为了解决这个问题,我们提出了一个大规模的合成数据集,包括1319个对象,8270个场景和4.26亿个格拉斯普斯。除了基准测试之外,我们还从掌握数据中探索了数据有效的学习策略。我们揭示了以局部特征为条件的生成模型和强调复杂场景变化的GRASP数据集的组合是实现有效概括的关键。我们提出的生成方法在模拟实验中优于所有基准。更重要的是,它通过测试时间深度恢复表明了零拍的SIM到现实转移,获得了90.70%的现实世界灵巧抓地力成功率,展示了利用完全合成训练数据的强大潜力。

在情感和认知上相信您的AI代理
信任不仅是一个认知问题,而且是一个情感上的问题,但人类互动的研究主要集中在信任发展的认知途径上。的工作强调了对AI进行研究的重要性,尤其是在出现类似人类的LLMS驱动的对话剂的背景下。但是,对于AI代理人信任的二维结构,缺乏验证且可概括的措施。为了解决这一差距,我们通过基于场景的调查研究开发并验证了一组27个项目的语义差异量表,以实现情感和认知信任。然后,我们通过实验研究进行了验证并应用了量表。我们的经验发现表明,信任的情感和认知方面如何相互互动,并综合地塑造了一个人对AI代理人的整体信任。我们的研究方法和发现还提供了对最先进的LLM的可容纳性,以通过不同的途径促进信任的能力。
数字协作者:使用人工智能增强可视化设计中的任务抽象
摘要 在可视化设计过程的任务抽象阶段,包括在“设计研究”中,从业者使用可视化理论将观察到的领域目标映射到可概括的抽象任务,以便更好地理解和满足用户的需求。我们认为,由于设计师的偏见以及缺乏领域背景和知识,这种手动任务抽象过程容易出错。在这种情况下,协作者可以在这个重要的任务抽象阶段帮助验证并为可视化从业者提供健全性检查。但是,拥有人类合作者并不总是可行的,并且可能会受到同样的偏见和陷阱的影响。在本文中,我们首先描述与任务抽象相关的挑战。然后,我们提出了一个概念性的数字协作者 - 一种人工智能系统,旨在通过增强可视化从业者验证和推理任务抽象输出的能力来帮助可视化从业者。我们还讨论了设计和实施此类系统的几个实际设计挑战。
金属添加剂制造的变换高熵合金的一些不同特征
肾细胞癌(RCC)是一种常见的泌尿外科肿瘤,预后较差,因为对化学疗法和放疗不敏感。大约20% - 30%的RCC患者在第一次诊断时具有转移,因此只能进行全身治疗。由于肾脏肿瘤的异质性,对药物的反应因人而异。因此,患者衍生的类器官,高度概括的肿瘤异质性成为了高通量外生体药物筛查的有前途的模型,因此指导了RCC患者的药物选择。全身治疗RCC主要针对肿瘤微环境,包括新生血管和免疫细胞。我们回顾了几种方法,其中使用了患者衍生的类器官模型模仿不仅肿瘤上皮的异质性,而且还模仿肿瘤微环境的异质性。我们进一步讨论了患者衍生的类器官发展的一些新方面,并保留了RCC患者的体内疾病。

疲劳开裂与修复 - 船舶结构委员会
表 7 列出了本研究中考虑的细节类型。根据要考虑的复杂程度,列表可能会更长或更短。决定采用此特定列表是因为它与 TSCF [3] 使用的列表非常接近。在制定此列表时,考虑因素之一是该列表必须与本项目疲劳部分使用的列表兼容。该研究使用的细节列表比此处使用的列表更为详尽。例如,不包括任何类型的支架,也不包括一些细节,例如中心线大梁。人们认为,细节列表越大意味着自由度的大幅增加意味着每次分析的样本量减少,从而降低了对结果的信心。由于腐蚀的可变性,在这种类型的研究中,重要的是获得尽可能大的样本量,以便任何统计数据都能准确反映现实。选择 TSCF 基本细节列表作为基础,既能满足简要概括的要求,又能与疲劳研究兼容。
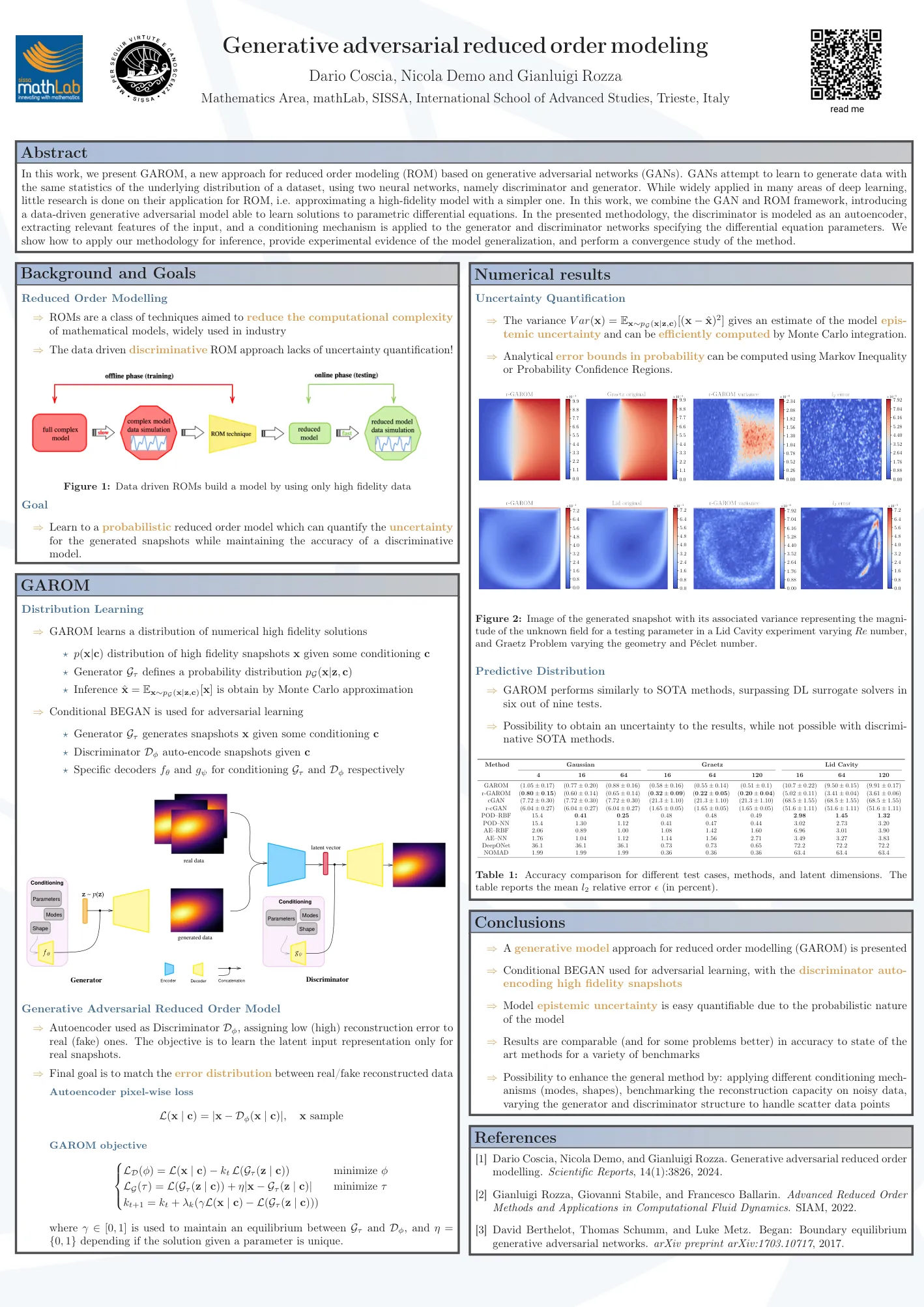
dario Coscia,Nicola Demo和Gianluigi Rozza
在这项工作中,我们提出了Garom,这是一种基于生成对抗网络(GAN)的订购建模(ROM)的新方法。gan试图使用两个神经网络,即歧视器和生成器,以与数据集的基础分布相同的统计数据生成数据。虽然广泛应用于深度学习的许多领域,但很少对其ROM的申请进行研究,即使用更简单的模型近似高保真模型。在这项工作中,我们结合了GAN和ROM框架,引入了一个数据驱动的生成对抗模型,能够学习参数微分方程的解决方案。在提出的方法中,鉴别器被建模为自动编码器,提取输入的相关特征,并将调理机制应用于指定微分方程参数的生成器和鉴别网络。我们展示了如何将我们的方法应用于推理,提供模型概括的实验证据,并对该方法进行收敛研究。

一种训练智障自动化代理的实用方法
可以自主驱动应用程序用户界面完成用户任务的自动化系统非常有益,尤其是当用户在情境或永久性受损时。先前的自动化系统不会产生可概括的模型,而基于AI的自动化代理仅在模拟,手工制作的应用程序或累积高计算成本方面可靠地工作。我们提出了UINAV,这是一种基于示范的培训自动化代理的方法,可填充移动设备,但可以实现高成功率,并以适度的示威数量。为了减少示范开销,Uinav使用了裁判模型,该模型会立即对用户进行立即反馈代理失败的任务,并自动培养人类的示范来增加培训数据中的分歧。我们的评估表明,只有10个示威活动可以达到70%的精度,并且通过足够的演示,它可以超过90%的精度。

改善通过多项式表示自主驾驶的轨迹预测的分布外概括
摘要 - 针对分布(OOD)样本的鲁棒性是轨迹预测模型的关键性能指标。但是,最先进(SOTA)模型的开发和排名是由其在单个竞争数据集上的分布(ID)性能驱动的。我们提出了一个OOD测试协议,该协议在两个大规模运动数据集中均质化数据集和预测任务。,我们基于模型的输入和输出侧的代理轨迹和道路几何形状的多项式表示引入了一种新颖的预测算法。随着模型大小,训练工作和推理时间的较小,我们到达Sota Performence进行ID测试,并显着提高OOD测试中的鲁棒性。在我们的OOD测试方案中,我们进一步研究了SOTA模型的两种增强策略及其对模型概括的影响。强调ID和OOD性能之间的对比度,建议将OOD测试添加到轨迹预测模型的评估标准中。