XiaoMi-AI文件搜索系统
World File Search System模块化

模块化对电池存储系统成本效益的影响
• 电池设计 • 电池充电图 • 过度充电保护 • 完全充电切断策略 • 热管理 • 减压阀 • 集成灭火器 • 系统级保护设备 • 制造要求 • 安全测试 • 认证 • 基于应用程序的透明度
模块化快速以太网交换机 - Netgear
NETGEAR 的 FS726 和 FS750 是可扩展、高性能、符合 IEEE 标准的网络交换机,专为需要大量端口并希望获得高速 10/100 交换功能的用户而设计,以消除瓶颈、提高性能和提高生产力。两种交换机都设计有前模块托架,可容纳铜千兆模块或光纤千兆模块,以实现与服务器或网络主干的高速连接。内置模块化设计让您可以根据当前需求灵活购买,然后稍后添加到您的系统中。您可以为您的网络购买铜和光纤千兆模块的最佳组合 - 相同或各一个,因为每个模块托架都可以使用。为了简化安装,两种交换机型号都已准备好使用,无需配置。设置所需的一切都在包装盒中。

7280R3A模块化数据中心开关路由器
以易于维护操作和灵活性的设计,可以将7280R3A模块化平台作为多个网络角色的常见构建块部署,并具有在每个部署中部署正确的接口混合物的能力。该系统还与Arista 7358x4共享其电源和高性能IO模块,以简单迁移,重新配置和保留。7280R3A模块化提供了三个级别尺度和功能的选择。标准(R3A),加密(R3AM)和大规模(R3AK)开关卡每个都提供高性能,并为企业和服务提供商提供全面的功能。适用于现代大型网络中的叶子或脊柱部署,以解决通过较低功率提高网络容量和效率的挑战,增强的自动化和可伸缩性的进步。

通过收缩理论稳定的模块化控制
我们提出了一种新颖的观点,以将控制理论结果与强化学习(RL)的控制稳定性,鲁棒性和政策转移:为模构架设计部署收缩理论。我们利用收缩理论的模块化来设计坐标转换,该转换可以简化非线性约束,以使稳定性变成可溶解的稳定性,从而在控制网络的输入梯度上产生线性约束。这些约束可以在控制体系结构中实现,因此学习框架保持不变,这是保证控制稳定性的最低侵入性方法。我们还得出相应的理论来表征鲁棒性。为了减轻动态模型的限制和要求,我们提出了一个模块化控制体系结构,包括坐标转换,复合变量和任务空间控制器,可以说很容易与未知环境中的机器人操作进行层次RL集成,并改善其性能。我们在两个模拟的操作场景中演示了我们的结果。这项工作提出了制定建筑设计问题来创建与收缩指标配对的Riemannian空间的潜力。关键字:模块化,收缩理论,增强学习,控制稳定性
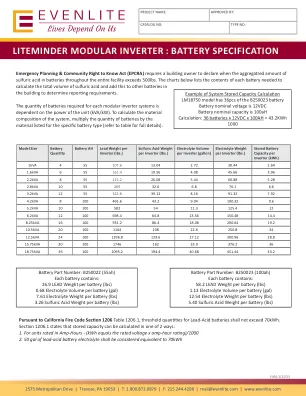
LITEMINDER模块化逆变器:电池规格
紧急规划和社区知情行为(EPCRA)要求建筑物所有者宣布何时在整个设施中何时在电池中汇集的硫酸何时超过500磅。下面的图表列出了计算总硫酸总量所需的每个电池的内容,并将其添加到建筑物中的其他电池中以确定报告要求。
为什么进化心理学应该放弃模块化
尽管大多数心理学家和哲学家都会为思想带来一定程度的模块化,但进化心理学尤其被认为是极端的大规模模块化 - 这种观念是,思想主要是,即使不是完全由不同的系统或模块组成的观念(Bechtel,2003; Samuels,2000; Samuels,2000,2012)。巨大的模块化是怀疑或彻底拒绝进化心理学的常年理由(有关评论,请参见Goldfinch,2015年),关于思想是大规模模块化的漫长争论,或者在40年中,在40多年中,在观察中没有解决的问题(E.G.G.G.G.G.G.G.G.G. 2005,2005年),2005年,2005年,2005年; Barrett&Kurzban,2006年,Carruthers,2003年,2006年,Chiappe&Gardner,2012年,,,, 2008年,Newcombe等人,2009年,2006年;
小型模块化反应堆和先进模块化反应堆的发展:对高活性废物和乏燃料管理的影响
出于能源安全和环境原因,尤其是考虑到部署 GW 级反应堆的困难,国际上和英国国内都大力推动 SMR 和 AMR 设计及其商业部署的开发。在许多情况下,这将涉及政府通过英国核能公司 (GBN) 提供的财政和实际支持,该支持已由《2023 年能源法》纳入法定基础。然而,至关重要的是,在支持和开发这些技术的过程中,要充分考虑这些后端操作,以避免可能代价高昂的错误和未来风险,其后果可能会落在英国纳税人的身上,并在未来很长一段时间内承担。一个例子是追求反应堆技术 (Magnox 和 AGR) 1,这导致英国储存了大量辐照石墨,由于其数量庞大、放射性核素复杂且寿命长,管理存在重大问题。2 例如,要想在 21 世纪的反应堆中成功部署石墨,就需要仔细考虑,以避免出现此类问题
小型模块化反应堆部署技术路线图
2015 年 9 月,联合国大会通过了《2030 年可持续发展议程》[1],其中包含 17 项可持续发展目标 (SDG)。目标 7、9 和 13 分别题为“可负担的清洁能源”、“工业、创新和基础设施”和“气候行动”。2015 年 12 月,在巴黎举行的联合国气候变化框架公约 (UNFCCC) 缔约方大会 (COP) 第 21 届年会上,195 个国家达成了一项具有历史意义的、有史以来第一个具有法律约束力的全球气候协议,制定了一项行动计划,将全球变暖限制在 2°C 以下 [2]。为了实现这些目标,需要在全球范围内改变能源生产和消费方式。此外,需要广泛的低碳能源技术支持这一转变,包括各种可再生能源技术、能源效率措施、先进车辆、碳捕获和储存以及核能。《巴黎协定》为核电发展提供了激励,因为每个签署国都必须每五年更新一次其国家自主贡献。

模块化线性驱动低温冷却器电子设备
Iris Technology Corporation 开发的模块化高级低温冷却器电子设备 (MACE) 系统将可配置的高功率电机驱动器与精确遥测功能相结合,其设计可承受辐射加固。位于低温冷却器附近的遥测聚合单元 (TAU) 通过在本地数字化传感器数据以传输回控制器,最大限度地减少了敏感低温冷却器反馈的衰减和污染,而主控制单元 (MCU) 中的多个 500 W 驱动通道可提供高达 95% 效率的功率波形。模块化设计概念允许在需要更多通道时添加驱动卡,或移除驱动卡以减小尺寸、重量和功耗。TAU 集成了多达 14 个外部传感器,总数据速率高达每秒 800,000 个样本,由控制软件动态分配给任何遥测组合。可以通过安装商用组件或利用替代控制方案来降低抗辐射控制器组件的成本,从而实现电子设备的低成本版本。雷神公司进行了一次演示,演示中驱动了高容量 RSP2 (HC-RSP2) 低温冷却器,温度和振动控制环路在高功率和低低温下关闭。本文讨论了 MACE 的开发、测试和经验教训。

迈向持久陆地传感器模块化自主性...
ASM 能够感知环境、处理原始数据并针对预配置的目标配置文件执行目标检测。在 SAPIENT 概念下,ASM 还能够自主决定自己的传感器参数(例如,被动 EO 传感器的视野、视角、焦点等,或主动传感器的发射功率、光束方向等),以提高检测/威胁识别能力。ASM 是独立的单元,只需要数据连接接口和电源即可运行。ASM 内部有传感器头、数据处理和自主决策等组件(见图 2)。传感器、数据处理和自主决策功能之间的所有内部通信对系统的其他部分都是不可见的。ASM