XiaoMi-AI文件搜索系统
World File Search System模拟
多孔陶瓷材料力学特性的离散单元法定量模拟
引用格式 : 周爽 , 苏景林 , 刘晓星 , 等 .多孔陶瓷材料力学特性的离散单元法定量模拟 .中国科学 : 物理学力学天文学 , 2019, 49: 064602 Zhou S, Su J L, Liu X X, et al.Quantitative simulation of mechanical properties of porous ceramic materials by discrete element method (in Chinese).Sci Sin-Phys Mech Astron, 2019, 49: 064602, doi: 10.1360/SSPMA2018-00332

纳米SiO2 改性聚丙烯薄膜热力学性能的分子动力学模拟
第 45 卷 第 5 期 中 国 电 机 工 程 学 报 Vol.45 No.5 Mar.5, 2025 2025 年 3 月 5 日 Proceedings of the CSEE ©2025 Chin.Soc.for Elec.Eng.2003

量子计算与量子模拟中离子阱结构研究进展 - 物理学报
图 6. 带有集成光学腔的离子阱:(a)因斯布鲁克大学的集成光学腔阱 [ 93 ]。从离子发射的 854nm 光子的 50% 可被腔收集,并转换为 1550nm 的通信波长。(b)萨塞克斯大学的集成光学腔阱。该阱展示了离子和腔模式之间的第一个强耦合。(c)奥胡斯大学的离子阱。腔镜 (CM) 沿轴向,径向泵浦光束用于将离子泵回多普勒冷却循环。这些离子可在 CCD 上成像。压电换能器 (PZT) 用于主动锁定光学腔与 RP 激光器共振。(d)当径向 RP 激光器开启时,大约 100 个离子的整个晶体都是明亮的。 (d)当径向RP关闭时,只有腔内的离子是亮态,腔外的离子处于暗态[144]。
不同取向B2 结构FeAl 合金纳米线弯曲行为的分子动力学模拟*
(b),6.000 nm(c),8.900 nm(d)和9.300 nm(e),其中颜色表示不同的局部晶体结构:蓝色-BCC,绿色-FCC,RED-HCP和White-Inninnown; (f)在1860 PS和d = 9.300 nm的纳米线内的应变分布,其中原子是通过其局部剪切应变颜色的。

Jiles-Atherton 磁滞模型的改进与非正弦激励下 软磁材料复杂磁滞准确模拟
输入数据: 1 ) i = 0 时刻: H (0) = 0 , M (0) = 0 , H m = 0 2 )磁化周期 0 — T 各时刻的磁密 B ( t ) 3 )模型初始参数及动态参数 R 、 v 、 α 、 k 对应函数 4 )磁化反转点磁密存储序列 [ B m (1), ⋅⋅⋅ , B m ( z )]

神经模拟管道:启用基于容器的模拟本地和公共云中的模拟
在这项研究中,我们探讨了计算神经科学中的模拟设置。我们使用Genesis,一种通用模拟引擎,用于亚细胞组件和生化反应,现实的神经元模型,大型神经网络和系统级模型。Genesis支持开发和运行计算机模拟,但留下了一个差距,用于建立当今更大,更复杂的模型。大脑网络现实模型的领域已过度生长了最早模型的简单性。挑战包括管理软件依赖性和各种模型的复杂性,设置模型参数值,将输入参数存储在结果旁边以及提供执行统计信息。此外,在高性能计算(HPC)上下文中,公共云资源正在成为昂贵的本地集群的替代品。我们提出了神经模拟管道(NSP),该管道有助于使用基础架构作为代码(IAC)容器化方法,促进了大规模的计算机模拟及其部署到多个计算基础架构。作者通过定制的视觉系统(称为retnet(8×5,1))使用生物学上可见的霍奇金 - 赫斯利尖刺神经元,证明了NSP在用创世纪编程的模式识别任务中的效果。我们通过在Hasso Plattner Institute(HPI)将来以服务为导向的计算(SOC)实验室以及通过全球最大的公共云服务提供商的Amazon Web Services(AWS)上执行54套本地执行的模拟来评估管道。我们报告了使用Docker的非候选和容器的执行,并在AWS中呈现每个仿真的成本。结果表明,我们的神经模拟管道可以减少神经模拟的进入障碍,从而使它们更实用和成本效率。

模拟-Rand.fi
是的,您可以继续使用现有的 Abaqus 工具,但现在您可以在 3D EXPERIENCE 平台上以前所未有的方式使用这些工具,以实现协作、共享和模拟管理。R2018X 现在支持平台上许多 SIMULIA 独立产品的连接 - 包括用于结构的 Abaqus、用于流体的 XFlow、用于多体模拟的 Simpack 和用于电磁学的 CST STUDIO SUITE。您可以捕获和发布最佳实践,共享和协作结果和方法,并与团队中的非专家完全集成。这使您的工作立即变得更加可见,从而更有价值,而不会破坏现有的方法和工具。它允许您执行端到端行业工作流程,包括原生 3D EXPERIENCE 和独立工具。
模拟 - Teratec
大数据得到了广泛的宣传,在每一次会议、每一个制造或研究项目中都会被提及。在法国,它是唯一一项既是法国工业复兴部长 Arnaud Montebourg 的 34 个“法国工业新面貌”项目之一,也是法国女商人 Anne Lauvergeon 担任主席的“创新 2030 委员会”七大目标之一的技术,该委员会旨在发掘国家冠军企业。这是理所当然的。据法国国家科学研究中心 (CNRS) 的研究人员称,大数据有许多工业应用。它使用根据真实数据创建的预测数学模型来定义,这些模型比模拟更可靠。它们真的更可靠吗?这还有待观察。目前,大数据主要被营销专家使用,他们试图理解此前从未收集过的数据洪流:互联网用户生成的大量数字数据。未来,数十亿台联网设备将生成数字数据。因此就有了预测数字数据中的行为模式的想法。这意味着使用模拟,对吗?不完全是。大数据通过考虑传感器数据而不是物理来提取行为模式。先入为主的模型被直接观察所取代。“我们正在重新发明物理学”,热情的研究人员说。好吧,差不多。然而,专家们承认,“虽然大数据使我们能够预测将要发生的事情,但它并不能解释原因。”大数据在确定复杂系统(飞行中的飞机、工业过程、车辆交通等)中的最佳运行条件方面前景广阔,但它预计不会取代模拟。无论如何,对于我们的十位冠军来说,他们不会取代模拟,他们已经将这项技术作为他们在工业上取得成功的关键技能之一。对于世界上一些最成功的研究实验室来说,他们也不会取代模拟,他们正在应对越来越雄心勃勃、规模越来越大的科研项目,需要越来越多的计算资源。至少,不是马上。❚❚
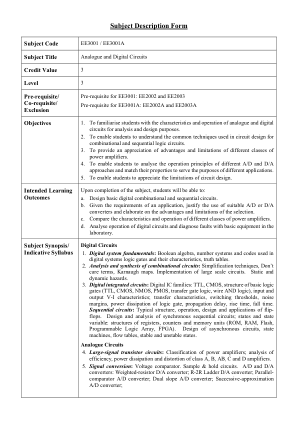
模拟和数字电路
1. 数字系统基础:布尔代数、数字系统中使用的数字系统和代码、逻辑门及其特性、真值表。2. 组合电路的分析与综合:简化技术、无关项、卡诺图。大规模电路的实现。静态和动态风险。3. 数字集成电路:数字 IC 系列:TTL、CMOS、基本逻辑门结构(TTL、CMOS、NMOS、PMOS、传输门逻辑、线与逻辑)、输入和输出 VI 特性;传输特性、开关阈值、噪声容限、逻辑门的功率耗散、传播延迟、上升时间、下降时间。时序电路:触发器的典型结构、操作、设计和应用。同步时序电路的设计和分析;状态和状态变量:寄存器、计数器和存储器单元(ROM、RAM、Flash、可编程逻辑阵列、FPGA)的结构。异步电路的设计、状态机、流表、稳定和非稳定状态。
