机构名称:
¥ 1.0
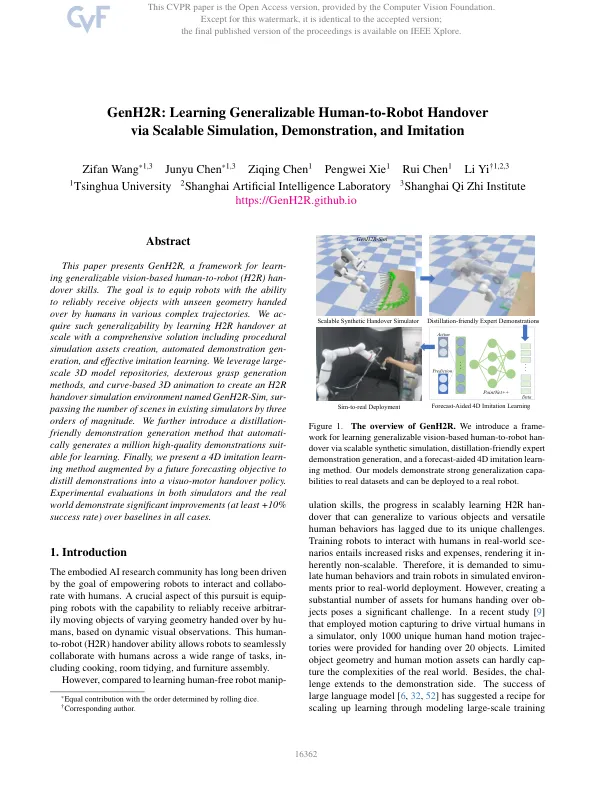
本文介绍了GenH2R,这是一个学习基于远见的人类到机器人(H2R)han-dover技能的框架。目标是为机器人配备能够以各种复杂轨迹的人类传递的几何形状可靠接收对象。我们通过通过全面的解决方案进行大规模学习H2R移交,包括程序模拟资产创建,自动演示式概述和有效的模仿学习。我们利用大型3D模型存储库,敏感的GRASP生成方法和基于曲线的3D动画来创建名为GenH2R-SIM的H2R交换模拟环境,并通过三个尺度级传递了现有模拟器中现有模拟器中的场景数量。我们进一步引入了一种蒸馏友好的演示生成方法,该方法自动产生了一百万个适合学习的高质量演示。最后,我们提出了一种4D模仿的学习方法,该方法通过将来的预测目标增强,以将示范示例提炼为视觉运动切换政策。在所有情况下,模拟器和现实世界中的实验评估都表现出比基线的显着提高(至少 +10%的成功率)。
genh2r:通过可扩展的模拟演示和模仿
主要关键词


相关文件推荐