XiaoMi-AI文件搜索系统
World File Search System欧拉法

基于牛顿-欧拉法的六旋翼飞行器运动方程研究
摘要 本文旨在设计和研究无人驾驶飞行器 (UAV) 六旋翼飞行器在三维空间中的动态模型。基于牛顿-欧拉法确定了导出的运动方程。这些方程具有非线性和耦合性。此外,为了使六旋翼飞行器具有真实的运动,模型中还嵌入了气动效应和扰动。六旋翼飞行器是一种垂直起降 (VTOL) 飞行器,具有悬停能力和灵活性,因此与固定翼飞行器相比毫不逊色。尽管如此,它的动态模型很复杂,被描述为不稳定的,并且不能在不扭转其轴的情况下进行平移运动。除了控制和仿真设计模块外,还通过 LabVIEW 软件建立了结论性数学模型。因此,对多个实验状态的稳定性进行了分析,以便提前展示用于平衡和轨迹跟踪的适当控制器。关键词:——无人机,六旋翼飞行器动力学,非线性控制,耦合和欠驱动模型,牛顿-欧拉方法。
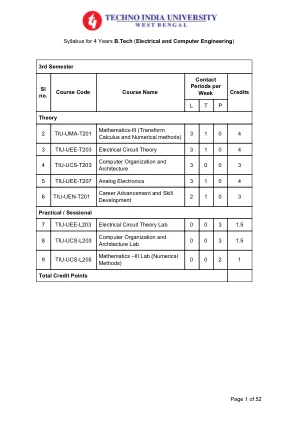
4 年制 B.Tech(电气和计算机)课程大纲...
详细课程大纲 第一单元:变换微积分拉普拉斯变换:拉普拉斯变换、性质、逆、卷积、用拉普拉斯变换求某些特殊积分、初值问题的解。傅里叶级数:周期函数、函数的傅里叶级数表示、半程级数、正弦和余弦级数、傅里叶积分公式、帕塞瓦尔恒等式。傅里叶变换:傅里叶变换、傅里叶正弦和余弦变换。线性、缩放、频移和时移性质。傅里叶变换的自互易性、卷积定理。应用于边界值问题。第二单元:数值方法近似和舍入误差、截断误差和泰勒级数。插值 - 牛顿前向、后向、拉格朗日除差。数值积分 - 梯形、辛普森 1/3。通过二分法、迭代法、牛顿-拉夫森法、雷古拉-法尔西法确定多项式和超越方程的根。通过高斯消元法和高斯-西德尔迭代法求解线性联立线性代数方程。曲线拟合-线性和非线性回归分析。通过欧拉法、修正欧拉法、龙格-库塔法和预测-校正法求解初值问题。

控制与仪表工程
16MA607 数值方法与优化 4 - 0 - 0 - 4 方程和特征值问题的解:线性插值法、假位置法、牛顿法、不动点定理陈述、不动点迭代、高斯消元法解线性系统、高斯-约登法和迭代法、高斯-约登法求矩阵逆、幂法求矩阵特征值。常微分方程的初值问题:单步法、泰勒级数法、欧拉法和修正欧拉法、用于解一阶和二阶方程的四阶龙格-库塔法。多步法:Milne 和 Adam 的预测器和校正器方法。线性规划:公式化、图形和单纯形法、大 M 方法、两相法、对偶单纯形法、原始对偶问题。无约束一维优化技术:必要和充分条件。无限制搜索方法:斐波那契和黄金分割法、二次插值法、三次插值和直接根法。无约束 n 维优化技术:直接搜索法、随机搜索、模式搜索和 Rosen Brooch 的山丘声称法、下降法、最速下降法、共轭梯度法、拟牛顿法。约束优化技术:必要和充分条件、等式和不等式约束、Kuhn-Tucker 条件、梯度投影法、割平面法、罚函数法。动态规划、最优化原理、递归方程方法、最短路线应用、货物装载、分配和生产计划问题。教科书/参考文献:1.S. S. Rao,“能源优化理论与实践”,John Wiley and Sons,2009 年。2.Taha H. A.,“运筹学——导论”,第八版,Prentice Hall
基于...的四旋翼无人机建模与PID控制
摘要:本文旨在探讨四旋翼无人机的建模与控制方法。建模过程中采用机构建模与实验测试相结合的方式,特别对电机和螺旋桨进行了详细的建模。通过对四旋翼无人机机体结构和飞行原理的了解,采用牛顿-欧拉法对四旋翼无人机进行动力学分析,建立了小角度转动下的无人机数学模型。采用过程辨识器(PID)对其进行控制。首先采用PID控制模型的姿态角,在此基础上采用PID控制各个方向上的速度。然后,利用MATLAB对重心偏移的四旋翼飞行器的PID控制进行仿真。结果表明:在重心不发生偏移的情况下,俯仰角和滚转角可以共同控制5°,PID可以有效地控制控制量,并在较短的时间内达到预期的效果。对经典BP算法、经典GA-BP算法、改进GA-BP算法分别进行了训练,共150组训练数据,训练函数采用Levenberg-Marquardt(trainlm),性能函数采用均方误差(MSE)。在同样噪声的背景下,改进GA-BP算法的检测率最高,经典GA-BP算法次之,经典BP算法最低。

基于 OpenFOAM 的 3D 欧拉/拉格朗日飞机结冰模拟求解器的开发
摘要:在开源 CFD 工具箱 OpenFOAM 中开发了 3D 结冰模拟代码。采用混合笛卡尔/贴体网格划分方法来生成复杂冰形周围的高质量网格。求解稳态 3D 雷诺平均纳维-斯托克斯 (RANS) 方程以提供绕翼的集合平均流动。考虑到液滴尺寸分布的多尺度特性,更重要的是为了表示过冷大液滴 (SLD) 不太均匀的特性,实现了两种液滴跟踪方法:为了提高效率,采用欧拉方法跟踪小尺寸液滴(50 µ m 以下);采用随机采样的拉格朗日方法跟踪大液滴(50 µ m 以上);在虚拟表面网格上求解表面溢流的传热;通过 Myers 模型估计冰积聚;最后,通过时间推进预测最终的冰形。由于实验数据有限,分别使用欧拉法和拉格朗日法对二维几何的三维模拟进行验证。事实证明,该代码在预测冰形方面是可行的,并且足够准确。最后,给出了 M6 机翼的结冰模拟结果,以说明完整的三维功能。

搭载空中机械手的六旋翼飞行器的导航控制与稳定性研究
摘要 本文使用牛顿-欧拉法建立了配备机械臂的六旋翼飞行器的动力学模型,并研究了其稳定性。为了模拟干扰,使用了简化的摆锤法。这种六旋翼飞行器配置以前从未在科学论文中涉及过。所得模型是一个非线性、耦合和欠驱动的动力学模型,其中包括由于六旋翼飞行器配备机械臂而产生的空气动力学效应和干扰。本文的目的是全面研究使用简化摆锤法确定六旋翼飞行器的惯性矩,同时考虑到质量分布和重心变化的影响,这是六旋翼飞行器在空中运动期间机械手连续运动的结果。实验测试是使用 Solid Works 应用程序进行的,并使用 LabVIEW 进行评估,以便全面了解插入到动力学模型中的干扰。整个飞行器模型由四个经典的 PID 控制器驱动,用于控制飞行器的姿态和空间中所需轨迹的高度。这些控制器用于很好地理解如何评估和验证模型,使其成为抗干扰模型,此外,它们还易于设计和快速响应,但它们需要开发才能获得最佳结果。将来,将定义精确的轨迹,
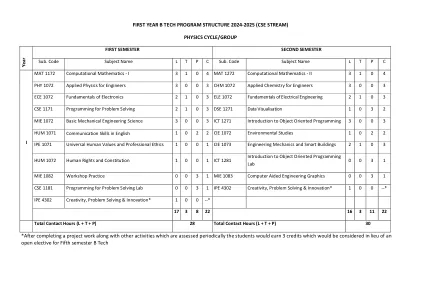
第一年 B TECH 课程结构 2024- ...
用数值方法求解方程。• CO5:应用插值概念求解数值微分和积分问题。教学大纲:矩阵代数:基本列变换和行变换、通过基本行运算求逆矩阵、矩阵的梯形和秩、线性方程组:一致性、高斯消元法、高斯-乔丹法、雅可比法和高斯-赛德尔法求解、特征值和特征向量:基本性质、谱矩阵分解、对角化、矩阵的幂。向量空间:向量概念向高维的推广、广义向量运算、向量空间和子空间、线性独立性和跨度、基。内积空间和 Gram-Schmidt 正交化过程。线性变换。微分方程及应用:一阶和高阶线性微分方程。用逆微分算子、参数变分法和待定系数法求解齐次和非齐次线性方程。代数和超越方程的解:参数曲线的追踪:摆线和相关曲线。二分法、试位法、牛顿-拉夫森法。用牛顿-拉夫森法求解非线性方程组。插值:有限差分和除差分。牛顿-格雷戈里和拉格朗日插值公式。牛顿除差插值公式。离散数值微分、数值积分:梯形法则、辛普森 1/3 法则和辛普森 3/8 法则。常微分方程的数值解:泰勒级数法、修正欧拉法、龙格-库塔法。参考书: