XiaoMi-AI文件搜索系统
World File Search System步中
高阳科技(中国)有限公司
鉴于2023年国内市场利率持续偏低,穗信云链把握机遇,加强与各大金融机构的紧密合作,以更高效率、更低利率为中小企业提供信贷支持。集团不仅全面支持新一代票据及供应链票据受理,还加强银行承兑汇票受理,与近10家银行合作。随着穗信云链服务受理能力的进一步提升,2023年交易规模突破百亿元,较去年同比增长131%。其中票据业务同比增长185%,带动金融科技服务板块经营利润达4,300万港元,同比增长190%。

SESAR 运营概念第 1 步
执行摘要 背景和目标 SESAR 运营概念 (CONOPS) 第 1 步文件提供了顶层指导,是所有与运营相关的 SESAR 任务的主要共同参考。目标是描述设想的 ATM 运营,以便民用和军用空域用户、服务提供商、机场、航空和 ATM 行业以及 SESAR 计划任务在 SESAR 开发的第一步中对 ATM 的运营特征以及它们在运营实践中暗示的主要变化以及它们所需的支持达成共识。同时,该概念认识到人类在未来系统中继续发挥的重要作用。程序将发生重大变化,未来的态势感知需求将与今天不同。SESAR CONOPS 可以看作是 ICAO 全球空中交通管理运营概念的具体应用,经过改编和解释,适合欧洲,并充分考虑到全球互操作性的需要。CONOPS 还旨在描述 SESAR(欧洲)对“航空系统模块升级”的投入,该升级描述了一套空中交通管理解决方案。该文件由 SESAR WP B4.2 创建。我们的目标是创建一个结构化的文件,便于管理层和专家层使用。
中电控股有限公司 CLP Holdings Limited
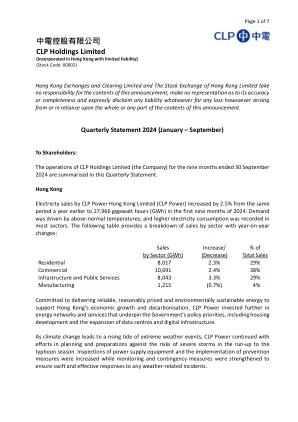
占总销售额百分比 住宅 8,017 2.3% 29% 商业 10,691 2.4% 38% 基建及公共服务 8,043 3.3% 29% 制造业 1,215 (0.7%) 4% 中华电力致力提供可靠、价格合理及环境可持续的能源,以支持香港的经济增长及减碳目标,并进一步投资能源网络及服务,以配合政府的政策重点,包括房屋发展、数据中心及数码基础设施的扩建。 气候变化导致极端天气事件频发,中华电力继续努力为台风季节前夕的严重风暴风险做好规划和准备,增加对供电设备的检查和预防措施的实施,同时加强监测和应变措施,以确保对任何与天气有关的事故作出迅速有效的反应。

神经反馈训练中的虚拟现实技术综述
第 35 卷 第 8 期 计算机辅助设计与图形学学报 Vol.35 No.8 2023 年 8 月 Journal of Computer-Aided Design & Computer Graphics Aug. 2023
乌克兰危机中网络空间对抗的影响及启示∗
DUstin VolzaandRobert Mc Milllan 和“In Ukraine and a ‘FUll-Scale Cyberwar’ emerges”。http://www.wwwˀ��w˽�ˀ�� com/articles/in-uk-raine-a-full-scale-cyberwar-emerges-11649780203ꎻDustinVolz,“微软称与俄罗斯有关的黑客对乌克兰发动了数百次网络攻击”。hhttps: // wwwwwɀwsjưcom/ 文章/ 黑客-链接-向-俄罗斯-发起-数百次-of-cyberattacks-in-ukrraine-microsoft-says-11651078821 访问时间:2月022年11月18日

CRISPR/Cas9技术在药用植物中的应用与展望
知途径; 虚线代表未知途径; 图2(在线颜色)萜类,生物碱和苯丙烷的生物合成途径。萜类生物合成的途径可以分为三个阶段。第一阶段:IPP或DMAPP由G3P和丙酮酸或乙酰辅酶A作为底物产生;第二阶段,IPP和DMAPP用作底物来生成萜烯前体GPP,FPP和GGPP。第三阶段:GPP,FPP和GGPP在TPS的作用和修饰酶的作用下产生特定的萜类化合物。涉及萜类合成途径的酶包括:DXS,DXR,AACT,HMGS,IDI,GPS,FPS,FPS,GGPPS,GGPPS,ADS,CPS,CPS,CYP76AK2,CYP76AK2,CYP76AK3,CYP76AK3,PDS,PPTA / G,PPTA / G,CYP5150L8,和CYP505DD13D13。生物碱使用氨基酸作为其前体。4-羟基苯基甲醛和多巴胺转化为(S) - 霉菌,这是苄基等喹啉生物碱的前体;色素通过吲哚途径从分支酸合成,IPP/DMAPP通过虹膜素途径转化为secologinin。色素和secologanin被转化为严格辛汀,这是单二烯吲哚吲哚生物碱的常见前体。涉及生物碱合成途径的酶包括:NCS,TNMT,MSH,SOMT,TDC,CYP719A19,STOX,COOMT,COOMT,STR,SGD,SGD,4'OMT,G10H,G10H,G10H,SLS,SLS,LAMT和HSS。苯丙烷合成途径始于苯丙氨酸。苯丙氨酸被催化至4-甲基二氧化碳,该COA与丙二酰辅酶A反应形成类黄酮,并与3,4-二羟基苯乙酸形成酚酸。参与苯丙烷合成途径的酶包括:PAL,C4H,4CL,CHS,IFS,CHI,CHI,F3H,DFR,ANS,GTS,GTS,C3H,CCR,CCR,RAS和LAC;黄色块代表苯丙烷;蓝色块代表生物碱;绿色块代表萜烯;实线代表已知途径;虚线代表未知的途径;两条固体/虚线表示多步反应
乌克兰危机中网络空间对抗的影响及启示∗
DUstin VolzaandRobert Mc Milllan 和“In Ukraine and a ‘FUll-Scale Cyberwar’ emerges”。http://www.wwwˀ��w˽�ˀ�� com/articles/in-uk-raine-a-full-scale-cyberwar-emerges-11649780203ꎻDustinVolz,“微软称与俄罗斯有关的黑客对乌克兰发动了数百次网络攻击”。hhttps: // wwwwwɀwsjưcom/ 文章/ 黑客-链接-向-俄罗斯-发起-数百次-of-cyberattacks-in-ukrraine-microsoft-says-11651078821 访问时间:2月022年11月18日
Has-miR-107及ZFPM2在胰腺癌中的潜在研究价值
对放射疗法和化学疗法的晚期检测和有限的敏感性,5年的存活率小于5%。随着科学技术的发展,miRNA在癌症中的关键作用已得到证实。miRNA已迅速成为新型抗癌疗法发展的有希望的靶标。中,发现miR-107及其潜在的下游靶基因ZFPM2与各种癌症有关,但是对它们在胰腺癌中作用的研究仍然有限。它们具有改善胰腺癌早期检测和治疗中当前挑战的潜在价值。本文回顾了其他肿瘤中有关miR-107和ZFPM2的现有研究,旨在为胰腺癌的早期发现和靶向治疗提供新的见解。
免疫治疗在胃癌伴肝转移中的应用
治疗选择。这些治疗方法旨在提高患者的生活质量并扩大生存率,反映出胃癌管理及其肝转移的进步。这种意义的意义在于它的重点是肝转移如何影响免疫疗法在胃癌中的功效,这一问题既重要又紧急。尽管许多研究探索了胃癌的免疫疗法,但相对较少的特异性针对肝转移患者。本研究旨在解决这一差距并为临床决策提供信息。