XiaoMi-AI文件搜索系统
World File Search System步进电机

基于NSUC1610的车载步进电机控制
NSUC1610 是通过反电动势的大小来进行堵转检测,在马达相位未通电期间,可以检测到 BEMF 电压。但这 不包括全步进模式,因为两个相位始终通电。以下假设在微步进模式下检测失速,BEMF 电压与电机转速成 正比,这样可以判断电机是否运行。由于只有在一相未通电的情况下才能进行测量,因此对 BEMF 电压的观 察非常有限。对于理想的电机,在没有任何负载和损耗的情况下,转子将随着定子磁场持续旋转,并且在相电 流为零时,可以看到 BEMF 电压的峰值。对于实际电机和外加负载,转子将始终滞后于定子磁场。此负载相关 相位滞后将导致固定测量点处 BEMF 电压的负载相关变化。在零相位滞后的情况下,可以测量 BEMF 电压峰 值,并且只能看到反电势与速度的相关性。在与负载变化的情况下,反电势会产生相位滞后,BEMF 电压将从 峰值将出现偏移,当这个电压大于或者小于一个阈值时,这就标志着检测到失步点,电机运动将停止。BEMF 电压测量仅在零电流阶跃期间启用。在零电流阶跃结束时,采样和测量最后一次 BEMF 电压值。这可确保线 圈电流达到零,且 BEMF 电压实际可见。根据电机参数、速度和阶跃模式,零阶跃可能会变短,并且无法获得 明显的 BEMF 电压。此时则无法检测失速。失速检测仅在匀速运动期间进行,在加速或减速期间,BEMF 电压 可能非常低,则不会启用失速检测。具体电流波形如图 2.5 所示:

SMD3步进电机驱动器
使用的脚本语言是 JavaScript;它功能强大、易于使用且文档丰富。提供了一个全局“smd”对象,您可以通过它执行与 SMD3 的所有交互。输入“smd.”,将出现一个自动完成弹出窗口,显示所有可用命令以及每个命令的帮助文档。按 Enter 键选择一个选项,然后提供所需的任何参数。
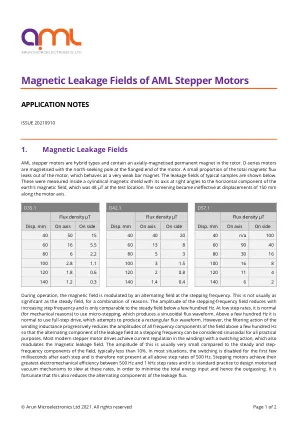
AML 步进电机的漏磁场
在操作过程中,磁场由步进频率的交变场调制。由于多种原因,这通常不如稳定场那么重要。步进频率场的幅度随着步进频率的增加而减小,并且仅在几百赫兹以下与稳定场相当。在低步进速率下,出于机械原因,使用微步进是正常的,微步进会产生正弦磁通波形。在几百赫兹以上,使用全步进驱动是正常的,全步进驱动试图产生矩形磁通波形。然而,绕组电感的滤波作用逐渐降低了几百赫兹以上场的所有频率分量的幅度,因此,步进频率下的漏磁场的交变分量在所有实际用途中都可以被视为正弦波。大多数现代步进电机驱动器通过开关动作实现绕组中的电流调节,这也会调节磁漏场。与场的稳定和步进频率分量相比,漏磁场的幅度通常非常小,通常小于 10%。在大多数情况下,切换在每步之后的前几毫秒内被禁用,因此在步进速率高于 500 Hz 时根本不存在切换。步进电机在 500 Hz 和 1 kHz 步进速率之间实现其最大机电效率,并且设计电动真空机构以在这些速率下旋转是标准做法,以尽量减少总能量输入,从而减少排气。幸运的是,这还可以减少漏磁通的交变分量。
PBL 3775/1 双步进电机驱动器
2 1 [8] M B1 电机输出 B,通道 1。当相位 1 为高电平时,电机电流从 M A1 流向 M B1。 3 2 [10] E 1 共发射极,通道 1。此引脚连接到传感电阻 RS 到地。 4 3 [11] M A1 电机输出 A,通道 1。当相位 1 为高电平时,电机电流从 M A1 流向 M B1。 5 4 [12] V MM1 电机电源电压,通道 1,+10 至 +40 V。V MM1 和 V MM2 应连接在一起。 6,7 5, 6, [1-3, 9, GND 接地和负电源。注意:这些引脚用于散热。 18,19 17, 18 13-17, 确保所有接地引脚都焊接到适当大的铜接地平面 28] 上,以实现有效散热。 8 7 [18] V R1 参考电压,通道 1。控制比较器阈值电压,从而控制输出电流。 9 8 [19] C 1 比较器输入通道 1。该输入感测感测电阻两端的瞬时电压,由内部数字滤波器或可选外部 RC 网络滤波。 10 9 [20] 相位 1 控制输出 M A1 和 M B1 处的电机电流方向。当相位 1 为高电平时,电机电流从 M A1 流向 M B1。 11 10 [21] Dis 1 通道 1 的禁用输入。当为高电平时,所有四个输出晶体管都关闭,导致输出电流迅速减小至零。 12 11 [22] RC 时钟振荡器 RC 引脚。将一个 12 kohm 电阻连接到 V CC ,并将一个 4 700 pF 电容连接到地,以获得 23.0 kHz 的标称开关频率和 1.0 µ s 的数字滤波器消隐时间。 13 12 [23] V CC 逻辑电压电源,标称值为 +5 V。 14 13 [24] Dis 2 通道 2 的禁用输入。当为高电平时,所有四个输出晶体管都将关闭,从而导致输出电流迅速减小到零。 15 14 [25] 相位 2 控制输出 M A2 和 M B2 处的电机电流方向。当相位 2 为高电平时,电机电流从 M A2 流向 M B2。 16 15 [26] C 2 比较器输入通道 2。该输入感测传感电阻两端的瞬时电压,该电压由内部数字滤波器或可选的外部 RC 网络滤波。 17 16 [27] V R2 参考电压,通道 2。控制比较器阈值电压,从而控制输出电流。 20 19 [4] V MM2 电机电源电压,通道 2,+10 至 +40 V。V MM1 和 V MM2 应连接在一起。 21 20 [5] M A2 电机输出 A,通道 2。当相位 2 为高电平时,电机电流从 M A2 流向 M B2。 22 21 [6] E 2 共发射极,通道 2。此引脚连接到接地的传感电阻 RS。 23 22 [7] M B2 电机输出 B,通道 2。当相位 2 为高电平时,电机电流从 M A2 流向 M B2。1,24 NC SO 引脚 1 和 24 为“未连接”
PBL 3775/1 双步进电机驱动器
2 1 [8] M B1 电机输出 B,通道 1。当相位 1 为高电平时,电机电流从 M A1 流向 M B1。3 2 [10] E 1 共发射极,通道 1。此引脚连接到传感电阻 R S 接地。4 3 [11] M A1 电机输出 A,通道 1。当相位 1 为高电平时,电机电流从 M A1 流向 M B1。5 4 [12] V MM1 电机电源电压,通道 1,+10 至 +40 V。V MM1 和 V MM2 应连接在一起。6,7 5, 6, [1-3, 9, GND 接地和负电源。注意:这些引脚用于散热。18,19 17, 18 13-17, 确保所有接地引脚都焊接到足够大的铜接地平面 28] 上,以实现高效散热。8 7 [18] V R1 参考电压,通道 1。控制比较器阈值电压,从而控制输出电流。9 8 [19] C 1 比较器输入通道 1。此输入检测传感电阻上的瞬时电压,由内部数字滤波器或可选的外部 RC 网络滤波。10 9 [20] 相位 1 控制输出 M A1 和 M B1 处的电机电流方向。当相位 1 为高电平时,电机电流从 M A1 流向 M B1。11 10 [21] Dis 1 禁用通道 1 的输入。当为高电平时,所有四个输出晶体管均关闭,导致输出电流迅速降至零。12 11 [22] RC 时钟振荡器 RC 引脚。将一个 12 kohm 电阻连接到 V CC 并将一个 4 700 pF 电容连接到地,以获得 23.0 kHz 的标称开关频率和 1.0 µ s 的数字滤波器消隐时间。 13 12 [23] V CC 逻辑电压电源,标称值为 +5 V。 14 13 [24] Dis 2 禁用通道 2 的输入。当为高电平时,所有四个输出晶体管均关闭,从而导致输出电流迅速降至零。15 14 [25] 相位 2 控制输出 M A2 和 M B2 处的电机电流方向。当相位 2 为高电平时,电机电流从 M A2 流向 M B2。16 15 [26] C 2 比较器输入通道 2。此输入检测传感电阻上的瞬时电压,该电压由内部数字滤波器或可选的外部 RC 网络滤波。17 16 [27] V R2 参考电压,通道 2。控制比较器阈值电压,从而控制输出电流。20 19 [4] V MM2 电机电源电压,通道 2,+10 至 +40 V。V MM1 和 V MM2 应连接在一起。21 20 [5] M A2 电机输出 A,通道 2。当相位 2 为高电平时,电机电流从 M A2 流向 M B2。22 21 [6] E 2 共发射极,通道 2。此引脚连接到接地的传感电阻 R S。23 22 [7] M B2 电机输出 B,通道 2。当第 2 相为高电平时,电机电流从 M A2 流向 M B2。1,24 NC SO 引脚 1 和 24 为“未连接”
用于可再生能源收集的旋转直流发电机
摘要。目前,对可再生能源的需求越来越大;研究可再生能源发电需要小型或微型低转速发电机,可以为灯负载提供电力。发电机的选择不如使用高转速的直流电机那么合适,因为发电机仍然会产生小电压(<12V)和小电流。使用配备齿轮的直流电机需要很大的扭矩来旋转转子。克服这个问题的解决方案是使用步进电机作为低转速的直流发电机。步进电机具有多极线圈和永磁体,使其有资格作为发电机。本研究使用 nema23 步进电机作为直流发电机。使用的步进电机是 6 线步进电机(两对线圈)、半波整流器和用于缓冲电压的电容器。负载是 12VDC 灯。所得结果表明,步进电机发电机可以通过手动旋转打开灯。

具有自动跟踪功能的机载激光通信系统
捕获、对准与跟踪系统是机载激光通信的重要组成部分,是通信链路正常的前提和保障。为了解决机载环境下激光通信链路的自动跟踪问题,实现终端间光束的快速捕获、对准与跟踪。本文提出了采用步进电机作为控制伺服系统、四象限探测器作为探测单元自动跟踪的方法。脉宽调制信号控制步进电机转速,结合四象限探测器上光斑的位置分布,实现高精度光束跟踪。在此基础上进行了室内模拟实验。经过多次实验,跟踪精度优于2.5μrad,说明该系统可以应用于机载激光通信,验证了该方法对机载激光通信具有良好的自动跟踪性能。

微型电机目录 - Farnell
直流电机 ................................................................................................................................ 16 直流无刷电机 .............................................................................................................................. 70 Motomate ................................................................................................................................ 86 同步电机 ................................................................................................................................ 94 步进电机 ................................................................................................................................ 138 风扇 ...................................................................................................................................... 178

理学学士(应用科学)力学(12243006)
传感器:机械和光学限位开关、编码器、热电偶、应变计、CCD 摄像机、红外传感器、压电传感器、电容式传感器、扭矩传感器、触觉传感器、陀螺仪和超声波传感器。执行器:直流电机、步进电机、交流电机、气动执行器、液压执行器、记忆形状合金。信号调节:组件互连、放大器、模拟滤波器、调制器和解调器、模拟数字转换、采样保持电路、多路复用器、数字滤波器和惠斯通电桥的软件和硬件实现。控制:H 桥电机控制、PWM 电机控制、步进电机控制、液压和气动执行器的非线性控制、PLC、SCADA 系统、工业现场总线、微处理器控制。