XiaoMi-AI文件搜索系统
World File Search System流动的

磁场对倾斜渗透表面上的嗜热微极流体流动的影响:数值研究
摘要。研究人员报告了近年来了解技术和工业过程的许多数值和分析工作。微电子,热交换器,太阳系,能量发生器只是热和传质流的最新应用。在本研究工作中研究了倾斜的渗透性表面上微极流体在倾斜的渗透表面上的二维稳定不可压缩的MHD流动,而热辐射在热辐射效应下的贡献是作为加热源。由于这种侵扰,发展了基于能量,动量,角动量,质量和浓度的问题方程的数学模型。为了将当前问题转换为无量纲的普通微分方程,已经分配了非二维变量。进化的数学模型在Mathematica中的第4阶R-K方法求解器以及第4阶R-K方法求解器以及Mathematica中的第四阶数学求解。通过数字和表显示和分析结果。最后,将皮肤摩擦,Nusselt和Sherwood编号用于不同的参数因子。为了验证此问题中使用的数值方法的准确性,我们将数值结果与可用发现进行了比较,很明显,当前工作的结果与文献中报道的结果非常吻合。改善嗜热,辐射因子和施密特数的值会降低速度。温度曲线随着粘性耗散参数的增加而增强。辐射参数的较高值,嗜热参数,微连续性在平面表面附近增加,并逐渐降低远离平面表面。浓度的曲线通过增加嗜热参数和施密特数来减少。 皮肤摩擦和传质率的曲线降低了磁场,热辐射和施密特数值。浓度的曲线通过增加嗜热参数和施密特数来减少。皮肤摩擦和传质率的曲线降低了磁场,热辐射和施密特数值。

复杂结构微通道中传热和流体流动的计算机视觉和机器学习方法综述
摘要:高热流密度微器件的散热问题已成为迫切需要解决的问题,微通道内的沸腾传热是消除微器件高热负荷的有效方法之一。将图像技术与机器学习技术相结合,为微通道内流型与传热识别提供了一种新方法,利用纹理特征的支持向量机方法成功实现流型识别。为探究微器件内气泡动力学行为与流型,将图像特征与机器学习算法相结合,应用于沸腾流型识别,建立了流型演变与沸腾传热之间的关系,揭示了沸腾传热的机理。

流动的自我概念:大脑如何在融入社会反馈的同时,保持互联的自我概念的连贯性和积极性
D 8QLYHUVLW\ RI &DOLIRUQLD 5LYHUVLGH E ,QGHSHQGHQW 5HVHDUFKHU )UHPRQW &$ &RUUHVSRQGLQJ $XWKRU %UHQW +XJKHV (PDLO EKXJKHV#XFU HGX 1XPEHU RI 3DJHV )LJXUHV 7DEOHV $EVWUDFW :RUG &RXQW ,QWURGXFWLRQ :RUG &RXQW 'LVFXVVLRQ :RUG &RXQW 1R FRQIOLFW RI LQWHUHVW
回顾复杂的体外细胞培养,强调流体流动的重要性,并通过器官芯片肝脏模型进行说明
人们普遍认为,制药行业需要一种更具生理相关性的体外模型,以更好地预测药物毒性和疗效。十多年前,一种被称为“芯片器官”(OOAC)的新技术的出现引起了极大的兴奋,因为人们相信 OOAC 可以满足这一需求。政府机构和风险投资的开发活动和投资激增。大多数开发 OOAC 的组织选择使用采用微加工技术制造的微流体设备,该技术在电子行业有着悠久的成功历史,因为它在微电子芯片中提供了更强的功能、更好的性能和经济效益。然而,生物系统中液体流动的物理原理与控制微电子电路中电子的物理原理非常不同。经过 10 年的紧张发展,值得研究 OOAC 技术的现状并评估需要什么才能实现预期的转变。令人失望的是,包括 OOAC 在内的先进体外方法至今仍无法减少使用动物进行药物安全性评估的次数。似乎至少有三个因素:i) 缺乏对医学研究中动物替代与药物开发中高通量筛选 (HTS) 需求之间相互冲突的市场需求的理解 ii) 开发更复杂模型(尤其是在使用微流体时)的技术困难 iii) 在行业采用任何新技术之前,需要有证据表明该技术对行业具有强大的经济优势。

ISSN:2180-1363激活能量,扩散热,热扩散和霍尔电流对MHD Casson流体流动的影响
本研究文章涉及激活能量和霍尔电流对电动传导的纳米流动的影响,探索了连续拉伸的表面,并探索了扩散热和热扩散的影响。带有小雷诺数假设的横向磁场是垂直实现的。适当的相似性转换被用来将管理部分微分方程转换为非线性的普通微分方程。在射击方法的帮助下计算无量纲速度,温度和纳米颗粒浓度的数值溶液。通过图讨论了每个激活能量,霍尔电流参数,布朗运动参数,嗜热参数和磁参数对速度,浓度和温度的影响。沿X和z指导,局部努塞尔数和舍伍德数的皮肤摩擦系数是数值计算的,以查看新兴参数的内部行为。

对复杂体外细胞培养的综述,强调流体流动的重要性,并由器官在芯片肝模型上进行说明
广泛接受的是,制药行业需要在体外模型上更加生理相关,以更好地预测药物毒性和效率。10年前,新技术的出现令人兴奋,该技术被称为“芯片上的器官”(OOAC),因为人们相信OOA可能会满足这种需求。政府机构和风险投资的发展活动和投资激增。大多数开发OOAC的组织都选择使用使用微加工技术制造的微流体设备,该技术在电子行业取得了悠久的成功历史,因为它在微电体芯片中提供了提高的功能,更好的性能和经济利益。但是,生物系统中液体流的物理学与在微电路中控制电子的物理学大不相同。经过10年的激烈发展,值得研究OOAC技术的状况并评估提供预期的转型所需的内容。令人失望的是,包括OOAC在内的先进的体外方法还无法减少动物的使用来评估药物安全。似乎至少有三个因素:i)对医学研究中的动物替代品与药物开发中高通量筛查(HTS)的需求之间的冲突市场需求缺乏了解,ii)与更复杂模型相关的技术困难,尤其是在微型流通和III的使用方面的经济优势,尤其是在使用强大的行业方面的技术困难。

机器人 - 对象非流动的拉格朗日系统的建模,分析和控制:教程概述和观点
备注2。几类非平滑机器人系统(双皮动力[4,25,26,27,27,28,29,29,30,71,72],操纵[16,17,24,73,74,74,75,76,9,77],带有清理的系统,共同的机器人[78,79],跳高机器人[33],PUSTRIPS ISS [80]蛇机器人[36],电缆驱动的操纵器[46,47],带内转子的球形机器人[83])已经是自动控制或机器人文献中调查文章的对象。因此,再次彻底调查它们的范围不在本文的范围之内,因为这将产生重复和太多参考文献(大概数千个)。因此,我们对本文主要目的的参考文献感到满意。不足的系统也是引起很多关注的对象[84、85、86、87],但是这些调查文章中未包括机器人对象系统(1)([87]除外,很快就会审查其中的一些)。
TI 电机控制概要 - 德州仪器
1820 年,汉斯·克里斯蒂安·奥斯特发现导线中流动的电流会产生自己的磁场,当该磁场与第二个磁场相互作用时,就会在导体上产生一个力。该力与导线中流动的电流量、第二个磁场的强度以及受第二个磁场影响的导线长度成正比。力的方向可以通过一种称为右手定则的技术确定。如果您的右手如下图所示配置,其中拇指指向正电流流动的方向,食指指向第二个磁场的通量方向(即从北极流向南极),那么您的中指将指向作用在导线上的力的方向。
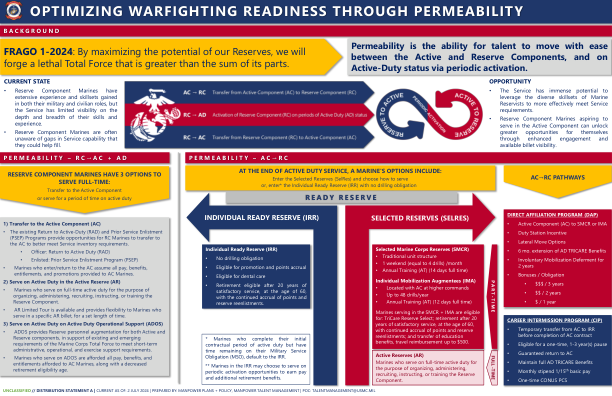
渗透性是指人才在现役和预备役部队之间轻松流动的能力,以及通过定期激活保持现役状态的能力。
在 SMCR + IMA 服役的海军陆战队员有资格享受:TriCare Reserve Select;服役 20 年后,在 60 岁时退休,继续累积积分和重新入伍预备役;以及教育福利转移,最高 500 美元的差旅报销。