XiaoMi-AI文件搜索系统
World File Search System流动
配偶、公务员、国家身份证流动表格
国家公务员(不包括武装部队部)收到您的调职令后,请将其连同此填妥的表格、您配偶提出的调职请求以及您认为有用的任何文件(简历等)一起发送发送至以下电子邮件地址:defense-mobilite-conjoint-fpe.contact.fct@intradef.gouv.fr
新兴市场债券流动和汇率回报
我们研究了一组新兴市场经济体 (EME) 的国际债券流动与汇率回报之间的关系。具体而言,我们调查国际净债券流动是否与当地货币兑美元的后续价值变化相关。使用投资组合方法,我们发现 EME 的债券流动与未来汇率回报之间存在正相关关系,而发达经济体货币则不存在这种关系。EME 货币往往会在债券大量流出后贬值,而在债券流入后则往往会升值。美元中性投资组合做多流入货币并做空流出货币,可获得大量超额回报,这些回报与已知的国际投资组合策略的回报无关。此外,使用资产定价方法,我们发现强有力的证据表明,该结果隐含的风险因素已在货币横截面中定价。这些发现与投资者要求补偿的风险相一致,即目前经历大量投资组合流入的国家可能面临未来总体金融状况收紧的风险。
不确定性冲击、资本流动和国际风险...
研究表明,外国投资者不断变化的风险偏好是全球金融周期的一个关键决定因素。这种风险情绪的波动也与无抛补利率平价 (UIP) 溢价、资本流动和汇率的动态相关。为了了解这些风险情绪的变化如何跨境传递,我们提出了一个两国宏观经济框架。我们的模型以美国金融中介机构跨境持有风险资产为特征,这些中介机构在金融摩擦下运作,并充当全球中介机构,承担外国资产风险。在这种设置下,美国特定不确定性的外生增加(以美国资产波动性增加为模型)导致两国风险溢价上升。发生这种情况的原因是,更高的不确定性导致美国中介机构面临去杠杆压力,从而引发全球风险溢价上升和全球资产价值下降。而且,当美国的不确定性上升时,外国对美元的汇率就会贬值,资本就会流出外国,外国的UIP溢价就会上升,而美国的UIP溢价就会下降,就像数据中显示的那样。关键词:金融摩擦、风险溢价、时变不确定性、中介资产定价、金融溢出效应、全球金融周期
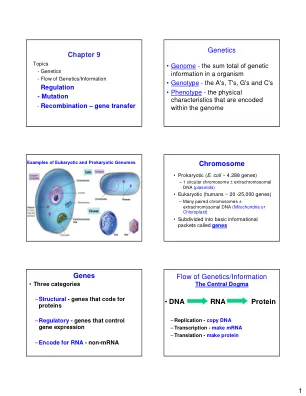
DNA RNA蛋白遗传学/信息的流动
•原核(大肠杆菌〜4,288个基因) - 1个圆形染色体±肉瘤外DNA(质粒)•真核生物(人〜20 -25,000个基因) - 许多成对的染色体±染色体±室内dna(基本植物)
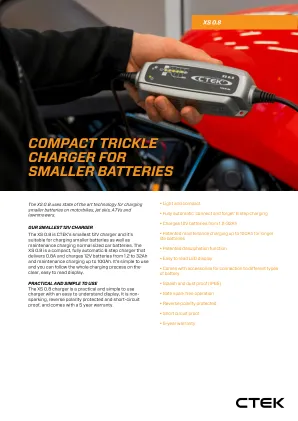
较小电池的紧凑trik流动器
*)如果充电器未连接到主电源,则后电流流量是排干电池的电流。CTEK充电器的后背电流非常低。**)充电电压和充电电流的质量非常重要。高电流纹波会加热电池对正电极的老化影响。高压波纹可能会损害连接到电池的其他设备。CTEK电池充电器可产生非常干净的电压和低纹波的电流。
经济自由促进收入向上流动
1 简介 经济自由与许多积极成果呈正相关,包括更快的经济增长(Hall 和 Lawson,2014 年)、环境进步(Barbier,2019 年)以及面对经济危机时更强的复原力(Geloso 和 Bologna Pavlik,2020 年;Candela 和 Geloso,2021 年)。最近,人们更加关注经济自由和收入不平等之间的联系,研究结果有些混乱,一些研究表明经济自由与更高水平的不平等有关,而另一些研究则发现相反的情况(Berggren,1999;Carter,2007;Ashby 和 Sobel,2008;Bennett 和 Vedder,2013;Apergis、Dincer 和 Payne,2014;Strum 和 De Haan,2015;Holcombe 和 Boudreaux,2016;Bennett 和 Nikolaev,2016、2017;Apergis 和 Cooray,2017;Bjørnskov,2017)。这些混乱的结果并不令人意外,原因有两个。首先,收入不平等的研究是出于对收入流动性的关注。毕竟,说经济自由与经济增长呈正相关并不能告诉我们最贫穷的人是否从这种增长中受益。其次,收入不平等数字是收入流动性的非常成问题的指标。如果使用一个收入不平等数据集而不是另一个数据集,类似的实证策略(相同的时间框架、方法、设计)会产生截然不同的结果(Holcombe 和 Boudreaux,2016 年)。因此,每个数据集的有效性都成为争论的对象(Piketty 和 Saez,2003 年;Mechling、Miller 和 Konecny,2015 年;Auten 和 Splinter,2019 年、2021 年;Larrimore 等人,2017 年、2021 年;Geloso 和 Magness,2020 年;Geloso、Magness、Moore 和 Schlosser,2018 年)。更重要的是,收入不平等的统计数据经常受到构成偏差的影响,这使其无法反映收入流动性。当新人加入现有人口但这些新人的收入分配与本地人口不同时,就会出现构成偏差。例如
流动食品单位计划审查包
2- 在获得许可的食品服务机构(根据 420-3-22-.09 的限制,可以是独立经营的企业)经营,该机构应具备在规定温度下储存食品的设施、盥洗设施,并且(所有食品都是预先包装的除外)应装满饮用水箱、清空废水箱、提供洗手池、提供合适的洗碗池和食品卫生规则要求的所有物品。如果移动单元上的食物制备活动会产生油脂或含有油脂的蒸汽,则配餐室必须根据当地要求配备油脂分离器。3- 移动单元上配备洗手设施;饮用水箱牢固固定在船上;废水储水箱牢固固定在船上,比饮用水箱大 15%;始终提供足量的温水(100°F)。4- 船上配备三格水槽,提供并使用化学试纸。

第 11 单元 经济中的资金流动
2) 资金流量表采用经济的不同部门分类。部门划分是根据功能和机构分类而设计的。这揭示了系统中发生的借贷以及收入支付和商品和服务的购买。国民收入核算中的部门分类过于综合。部门划分必须根据经济活动的功能方面进行设计。因此,除了世界其他地区和储蓄和投资账户外,还区分了消费者、生产者和政府部门。投入产出核算中采用的分类突出了按生产产品类型和使用的工业过程分类的各个行业。这显示了每个行业消耗的投入和每个行业生产的产出的分布。虽然部门划分更加详细,但它不适合揭示系统中资金的来源和用途。
美国在国际资本流动中的作用
经常账户长期以来一直是经济分析的主题,部分原因是自 1980 年代初以来,美国几乎一直处于经常账户赤字状态。由于总统之前的《经济报告》已经广泛报道了经常账户赤字,本章简要介绍了该主题,然后深入分析了美国金融账户(CEA 2022;CEA 2023b;CEA 2024a)。图 6-1 显示了 2000 年至 2023 年的美国经常账户。在此期间,经常账户平均赤字为 5520 亿美元,占 GDP 的 3.3%。2023 年,经常账户赤字为 9050 亿美元,其中货物和服务贸易差额接近 7850 亿美元。2023 年,收入收入为 1.57 万亿美元,收入支出为 1.69 万亿美元(BEA 2024a)。 2023 年,加拿大、中国和墨西哥是美国最大的贸易伙伴,占该国出口和进口的 30% 以上。将贸易逆差细分为商品和服务可以提供有用的见解。美国商品逆差(2023 年为 1.1 万亿美元)掩盖了美国服务贸易顺差(2023 年为 2780 亿美元),但值得注意的是,美国在服务出口方面保持着全球比较优势。

机器能像道一样流动吗?道家哲学关于人工智能
这个问题可能看起来很奇怪,但它与我们今天的生活直接相关。我的目的是将古老的道家哲学带入关于技术带来的挑战的讨论中。今天,尖端技术不仅存在于研究实验室中,而且已经很容易渗透到我们生活的各个方面。很难说我们还没有生活在一个人工智能 (AI) 的世界,因为它已经成为一种无处不在、有效的技术,融入了日常生活。技术挑战了人类作为人类的意义。想想我们对智能手机的依赖程度,自动驾驶汽车如何重塑我们的社区,机器人如何影响我们的道德社会意义,以及我们的社会价值观如何转变。技术是否构成了生存威胁?我们的价值观、社会和法律都以人为中心,那么人工智能革命会对它们产生什么影响呢?道家哲学为所有这些提供了重要而富有创意的声音。本文将从三个方面讨论这些问题: