机构名称:
¥ 2.0
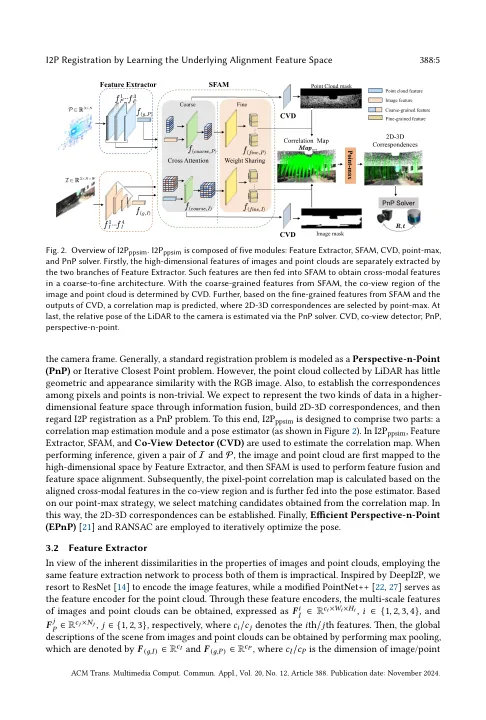
估计相机和激光雷达之间的相对姿势对于促进多代理系统中复杂的任务执行至关重要。尽管如此,当前的方法论遇到了两个主要局限性。首先,在跨模式特征提取中,它们通常采用单独的模态分支来从图像和点云中提取跨模式特征。此方法导致图像和点云的特征空间未对准,从而降低了建立对应关系的鲁棒性。第二,由于图像和点云之间的比例差异,不可避免地会遇到一到一对像素点的对应关系,这会误导姿势优化。为了应对这些挑战,我们通过学习从p ixel到p oint sim Imarlities(i2p ppsim)的基本对齐特征空间来提出一个名为i Mage-p oint云注册的框架。I2P PPSIM的中心是共享特征对齐模块(SFAM)。 它是在粗到精细体系结构下设计的,并使用重量共享网络来构建对齐特征空间。 受益于SFAM,I2P PPSIM可以有效地识别图像和点云之间的共同视图区域,并建立高可责任2D-3D对应关系。 此外,为了减轻一对一的对应问题,我们引入了一个相似性最大化策略,称为点最大。 此策略有效地过滤了异常值,从而确立了准确的2D-3D对应关系。 为了评估框架的功效,我们进行了有关Kitti Odometry和Oxford Robotcar的广泛实验。I2P PPSIM的中心是共享特征对齐模块(SFAM)。它是在粗到精细体系结构下设计的,并使用重量共享网络来构建对齐特征空间。受益于SFAM,I2P PPSIM可以有效地识别图像和点云之间的共同视图区域,并建立高可责任2D-3D对应关系。此外,为了减轻一对一的对应问题,我们引入了一个相似性最大化策略,称为点最大。此策略有效地过滤了异常值,从而确立了准确的2D-3D对应关系。为了评估框架的功效,我们进行了有关Kitti Odometry和Oxford Robotcar的广泛实验。结果证实了我们框架在改善图像到点云注册方面的有效性。为了使我们的结果可重现,源代码已在https://cslinzhang.github.io/i2p上发布。
I2P注册通过学习从像素到点相似性的基本对齐特征空间 通过滚动曲线在大规模点云中的全局本地化... ct-lvi:一个朝着连续的激光 - 视觉的框架... AI和大型模型的基础 对象重新识别的功能聚合和连接性 混合现实可视化和人脑的交互式血流动力学计算 Guihua Wang 实时的表面识别系统,用于可变的双头机器人步行速度 lcnet.pdf-科学技术学院
主要关键词


相关文件推荐