机构名称:
¥ 1.0
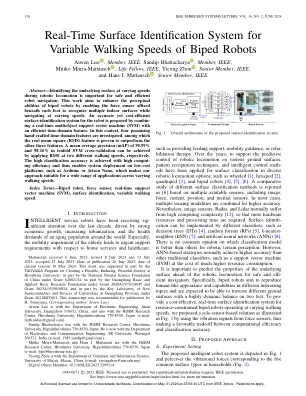
摘要 - 在机器人运动过程中以不同速度识别基础表面对于安全有效的机器人导航很重要。这项工作旨在通过在每脚下方固定的力传感器来识别多个室内表面,同时以不同的速度导航,从而增强了双子机器人的感知能力。通过将实时多对象支持向量机(SVM)与有效的时域功能相结合,提出了一种机器人的准确但成本较固的表面标识系统。在这种情况下,研究了四个有希望的手工制作的时域特征,其中均方根(RMS)功能被证明超过了其他三个功能。可以通过分别以两个不同的步行速度应用RMS来实现十倍SVM交叉验证中95.99%和98.16%的平均平均精度(地图)。具有较高的计算效率可以实现高分类精度,因此可以在诸如Arduino或Jetson Nano之类的低成本平台上进行系统部署,这使我们的方法适合在各种步行速度之间进行广泛应用。
Guihua Wang 实时的表面识别系统,用于可变的双头机器人步行速度 lcnet.pdf-科学技术学院
主要关键词



相关文件推荐