机构名称:
¥ 1.0
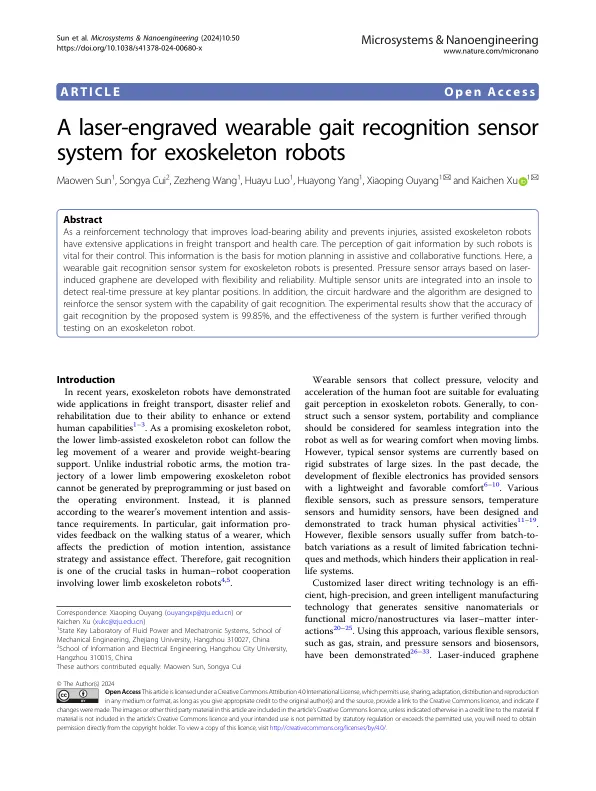
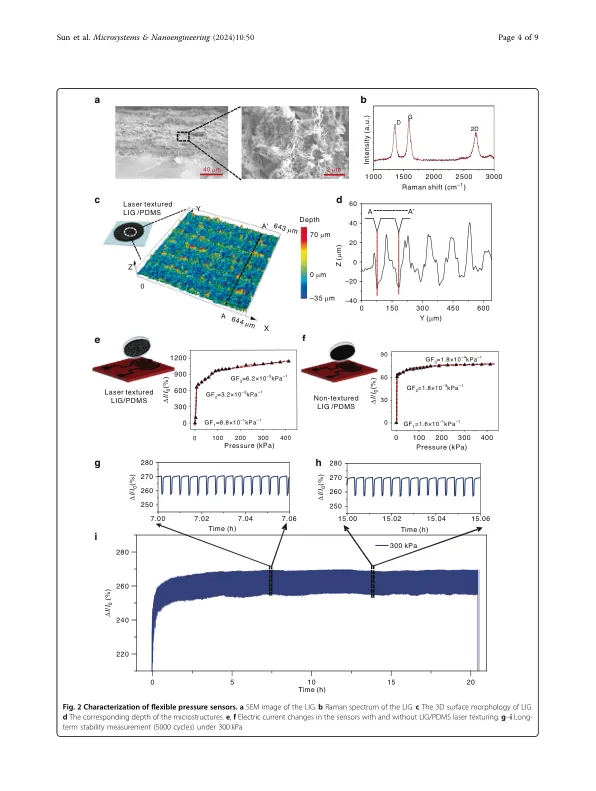
摘要作为一种增强技术,可提高承重能力并防止受伤,辅助外骨骼机器人在货运和医疗保健中广泛应用。这种机器人对步态信息的感知对于他们的控制至关重要。此信息是辅助和协作功能中运动计划的基础。在这里,提出了用于外骨骼机器人的可穿越步态识别传感器系统。基于激光诱导的石墨烯的压力传感器阵列具有灵活性和可靠性。将多个传感器单元集成到鞋垫中,以检测关键足底位置的实时压力。此外,电路硬件和算法旨在通过步态识别的能力加强传感器系统。实验结果表明,所提出的系统的步态识别的准确性为99.85%,并且通过在外骨骼机器人上进行测试进一步验证了系统的有效性。
外骨骼机器人的激光磨损的步态识别传感器系统
主要关键词

相关文件推荐