XiaoMi-AI文件搜索系统
World File Search System测量精度

静电梳状驱动微镜的集成电容传感方法
本文开发了一种基于机电调幅的实时电容传感方案,用于检测单轴静电梳状驱动微镜的扫描角度和相位,以实现闭环控制。该方案将一个叠加了高频载波信号的正弦波电压信号施加到微镜的共用梳状驱动器上,用于传感和驱动。对驱动/传感电路在频域和时域进行了全面分析,以消除馈通并最小化信号失真。实验结果表明,使用2.5 V pp 和1 MHz 的载波信号,微镜扫描角度的测量精度达到0.15 ◦,时间延迟可控制在0.47 μs 以内。为了更好地理解微镜的扫描稳定性,还研究了温度变化对微镜相位响应的影响。当温度从 25 ◦ C 变为 35 ◦ C 时,以 3840 Hz 驱动的微镜的测量时间延迟从 0 变为 2.4 μ s。所提出的电容式传感方案可用于同时有效测量静电梳状驱动 MEMS 镜的角位置和相位,而无需添加任何外部元件。
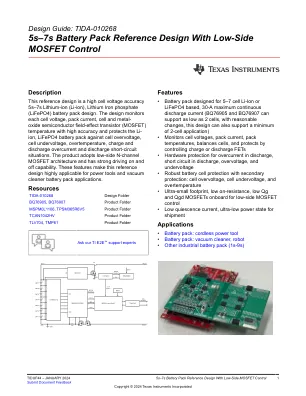
5s – 7s电池组参考设计带有低侧MOSFET控制
电池组的电池组和园林工具越来越多地使用锂离子,Li-Polymer或Li-rion-raphate细胞类型。这种化学的体积和重量能密度都很好。虽然该化学反应提供了高能量密度,从而降低了体积和重量作为优势,但化学物质与安全问题相关,需要更准确且复杂的监测和保护。这些担忧是细胞欠压(CUV)和细胞过压(COV),过度过敏(OT),均电荷(OCC)和放电(OCD)和短路放电(SCD),所有这些都会导致加速细胞降解,并导致热逃亡和爆发和爆发。因此,在某些不寻常的情况下,需要及时监视包装电流,电池温度和每个电池电压。必须保护电池组,以防止所有这些情况。始终需要良好的测量精度,尤其是细胞电压,包装电流和细胞温度。精度对于准确的保护和电池组的电荷状态(SOC)计算是必要的。由于平坦的电压,对于LifePo4电池组应用程序尤其如此。电池动力应用程序的另一个重要功能是当前消耗,尤其是在船舶模式或待机模式下。降低电流消耗可节省更多的能源,并提供更长的存储时间,而不会超过电池。

飞机使用 GPS 运行的数学模型
本文介绍了使用基于 GPS 技术的飞机自动着陆系统。GBAS(地面增强系统)系统由地面和飞机子系统组成。它使用 GPS 信号确定 3D 空间中的位置,比现有的 ILS 着陆系统具有更多优势,在不久的将来,ILS 着陆系统将被完全取代。本文概述了这些优势。特别强调的是,飞机在进近和着陆阶段可以沿着灵活的曲线轨迹进行引导。这一事实表明,飞机可以在更大的角度下着陆,并避开机场周围区域的障碍物,减少人口稠密地区的噪音等。在交通方面,GBAS 正在增加机场的容量,并支持单位时间内更多的飞机着陆。随着 GPS 技术的发展和坐标测量精度的提高,以及使用作为 GBAS 基础的差分 GPS,实现了满足着陆规定要求的精度。本文介绍了用于 Matlab/SIMULINK 着陆过程仿真的飞机模型和着陆制导系统模型。建模方法和仿真是开发着陆算法、评估系统性能以及评估风和传感器测量误差等各种障碍的影响的良好方法。

IIIIII.I.1.IIIIIIIII.II,I。 - NPL出版物
在评估频率标准时,有三个指标可以对其进行表征。它们是标准的稳定性、可重复性和准确性。在描述频率标准时,这三个术语具有特殊含义,不能互换使用。频率标准的稳定性描述了振荡(或时钟)频率随时间变化的程度。稳定的振荡器是指所有振荡在时间上间隔相等的振荡器。然而,稳定性并没有说明时钟的实际振荡频率,它只是描述了它的恒定程度。从历史上看,稳定性是通过使用从钟摆到氢原子钟、研究级石英振荡器到较新的低温蓝宝石振荡器以及现在的激光器的设备来实现的。可重复性描述了一组相同类型的频率标准之间的平均频率差。请注意,要达到特定的可重复性水平,稳定性需要超过该值,但反之则不然。氢原子钟就是一个很好的例子。这些设备产生的频率非常稳定(几千秒内可达 1 Ql5 分之一),但两台相同设计的设备的频率差异可能超过 1.Qll 分之一 [1.]。这是由于氢原子与它们所在的微波室之间的碰撞。标准的精度描述了其频率相对于秒的 SI 单位定义的测量精度,即 [2]:
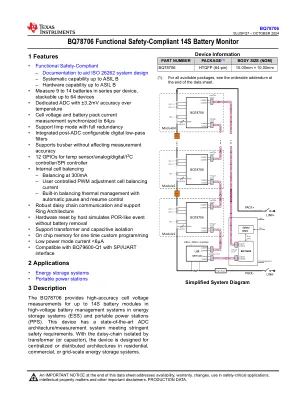
BQ78706 符合功能安全标准的 14S 电池监视器
• 符合功能安全标准 – 有助于 ISO 26262 系统设计的文档 – 系统能力高达 ASIL B – 硬件能力高达 ASIL B • 每个设备可测量 9 到 14 个串联电池,最多可堆叠 64 个设备 • 专用 ADC,全温度范围内精度为 ±3.2mV • 电池电压和电池组电流测量同步至 64μs • 支持具有完全冗余的跛行模式 • 集成后 ADC 可配置数字低通滤波器 • 支持母线而不影响测量精度 • 12 个 GPIO 用于温度传感器/模拟/数字/I 2 C 控制器/SPI 控制器 • 内部电池平衡 – 300mA 时平衡 – 用户控制的 PWM 调整电池平衡电流 – 内置平衡热管理,具有自动暂停和恢复控制 • 强大的菊花链通信和支持环形架构 • 主机硬件复位可在不移除电池的情况下模拟 POR 类事件 • 支持变压器和电容隔离 • 片上存储器可进行一次性自定义编程 • 低功耗模式电流 <6μA • 兼容采用带 SPI/UART 接口的 BQ79600-Q1

RF 性能测试指南白皮书
1 简介 ................................................................................................................ 4 2 输出功率 .............................................................................................................. 5 2.1 载波输出功率 .............................................................................................. 5 2.1.1 测试方法和设置 ...................................................................................... 5 2.1.2 测量校准 ............................................................................................. 6 2.2 载波扫描 ............................................................................................. 7 3 杂散发射 ...................................................................................................... 10 3.1 谐波输出功率 ............................................................................................. 10 3.1.1 测试方法和设置 ...................................................................................... 11 3.1.2 测量精度 ............................................................................................. 12 3.2 RX 本振泄漏 ............................................................................................. 12 3.2.1 测试方法和设置 ...................................................................................... 13 4 频率精度 ............................................................................................................. 15 4.1 测试方法和设置 ............................................................................................. 15 5 调制带宽 ............................................................................................................. 18 5.1 调制带宽理论 ................................................................................ 18 5.2 测试方法和设置 .................................................................................. 22 6 接收器灵敏度 .............................................................................................. 24 6.1 接收器灵敏度理论 .............................................................................. 24 6.1.1 误码率 ...................................................................................... 25 6.1.2 灵敏度精度 ...................................................................................... 25 6.1.3 灵敏度测量结果可以告诉您什么?................................... 27 6.2 测试方法和配置................................................................................ 28 6.2.1 测试设置.............................................................................................. 28 6.2.2 测量校准.............................................................................................. 30 6.2.3 低成本设置.............................................................................................. 30 7 接收机选择性................................................................................................. 32 7.1 理论...................................................................................................... 32 7.2 测试方法和配置...................................................................................... 33 7.2.1 测试设置............................................................................................. 33 7.2.2 测量校准............................................................................................. 35 7.3 干扰类型............................................................................................. 35 8 电流消耗............................................................................................. 36 8.1 静态和平均电流消耗............................................................................. 36 8.2 动态电流消耗............................................................................................. 37 8.2.1 测试方法和硬件设置有功电流消耗..................................................... 37 8.3 计算平均电流消耗................................................................................ 40 9 术语表................................................................................................ 41
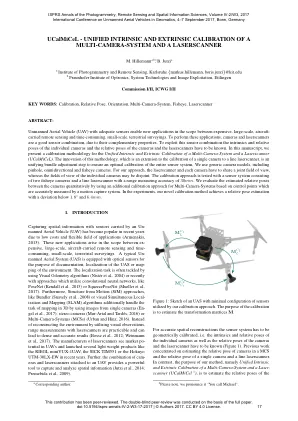
统一内在和外在校准... - KIT
配备足够传感器的无人驾驶飞行器 (UAV) 可在昂贵的大规模机载遥感和耗时的小规模地面测量之间实现新的应用。要执行这些应用,相机和激光扫描仪是很好的传感器组合,因为它们具有互补特性。要利用这种传感器组合,必须知道各个相机的内在参数和相对姿势以及相机和激光扫描仪的相对姿势。在本文中,我们提出了一种多相机系统和激光扫描仪统一内在和外在校准 (UCalMiCeL) 的方法。该方法的创新之处在于它是从单个相机到线激光扫描仪校准的扩展,它是一种统一的捆绑调整步骤,以确保对整个传感器系统进行最佳校准。我们使用通用相机模型,包括针孔、全向和鱼眼相机。对于我们的方法,激光扫描仪和每个相机必须共享一个联合视野,而各个相机的视野可能不相交。校准方法通过由两个鱼眼相机和一个线激光扫描仪组成的传感器系统进行测试,范围测量精度为 30 毫米。我们使用基于控制点的多相机系统附加校准方法定量评估相机之间的估计相对姿势,这些控制点由 mo

通过有序幺正对 Li6 核进行量子计算……
变分量子本征值求解器 (VQE) 是一种计算量子多体系统基态和激发态能量的算法。该算法的一个关键组成部分和一个活跃的研究领域是参数化试验波函数的构建——即所谓的变分拟定。波函数参数化应该具有足够的表现力,即对于某些参数值的选择,能够表示量子系统的真实本征态。另一方面,它应该是可训练的,即参数的数量不应该随着系统的大小呈指数增长。在这里,我们将 VQE 应用于寻找奇奇核 6 Li 的基态和激发态能量的问题。我们研究了在酉耦合团簇拟定中对费米子激发算子进行排序对 VQE 算法收敛的影响,方法是仅使用保留 J z 量子数的算子。在降阶的情况下,精度提高了两个数量级。我们首先使用具有任意测量精度的经典状态向量模拟器计算最佳假设参数值,然后使用这些值评估 IBM 超导量子芯片上 6 Li 的能量本征态。我们使用误差缓解技术对结果进行后处理,并能够重现精确的能量,对于 6 Li 的基态和第一激发态,误差分别为 3.8% 和 0.1%。
UltraCam 摄影测量数字航空相机
推扫式传感器 2000 年,徕卡公司首次推出了用于测绘的推扫式传感器,其应用范围不断扩大,重点是大面积正射影像镶嵌。在获取高质量、几何一致且稳健的影像方面,推扫式方法存在许多有据可查的缺点,这是因为成像质量和动态范围与机载平台的速度直接相关。推扫式捕获像素的有效覆盖范围形状也会随地速和高度而变化。最后,推扫式影像没有固有的几何强度,完全依赖于对机载 GPS 和 IMU 数据和时间的复杂处理,以生成可用于公制应用的影像。电子和处理方面的改进可以尽量减少但不能完全消除这些固有的挑战。推扫式传感器在市场上仍然很活跃,但主要用于正射影像镶嵌项目,在这些项目中,效率和摄影测量精度并不是最重要或最重要的因素。即使是曾经捍卫推扫式技术的供应商现在也认识到了取景传感器的优势,并同时提供这两种传感器。推扫式技术的基本限制是无法在不影响图像质量的情况下,在广泛的飞行高度和条件下提供灵活性和曝光控制。
A6-8 邀请 - NIST 的 TSAPPS
摘要;阿伏伽德罗常数与质量单位和各种基本物理和电常数有关,是精确测量分子质量的必要条件。由于半导体技术的最新成功,硅元素因其晶体中近乎完美的原子结构而成为精确测量的通用参考材料的可能候选者。使用硅晶体确定阿伏伽德罗常数的项目是世界标准组织研究的主题,具有历史意义。国家医学研究实验室的团队刚刚开始使用 1 千克完美硅球的长期项目的最后阶段。它使用光学干涉仪测量球体的直径,并使用国家千克标准测量其质量,从而得到球体的宏观密度。它还测量了由相同硅锭制成的 X 射线干涉仪的晶格间距。后者将与与比利时 CBNM. Geel 合作确定的平均原子质量相结合,得出微观密度。这两个密度之间的等效性提供了阿伏伽德罗常数。目前声称的测量精度为体积 O.3ppm、质量 O.05ppm、晶格间距 Ippm。该项目对相应测量的目标精度将提供总不确定度小于 0.3ppm 的阿伏伽德罗常数。 lut 修订于