XiaoMi-AI文件搜索系统
World File Search System湍流
使用平铺阵列进行深湍流相位补偿
摘要:平铺阵列使用模 2 π 相位补偿和相干光束组合来校正深湍流的影响。因此,本文使用波动光学模拟将平铺阵列的闭环性能与分支点容忍相位重构器(称为 LSPV + 7 [ Appl. Opt. 53 , 3821 (2014)])进行比较。波动光学模拟利用点源信标,并设置为从弱到强的闪烁条件。此设置可以进行权衡空间探索,以支持与 LSPV + 7 进行功率桶内比较。反过来,结果表明,在从弱闪烁条件过渡到强闪烁条件时,平铺阵列的表现优于 LSPV + 7。对于那些希望解决自适应光学中的分支点问题的人来说,这些结果既令人鼓舞又具有启发性。

实验室产生的湍流无碰撞冲击中的电子加速
天体物理无碰撞激波是宇宙中最强大的粒子加速器之一。超新星遗迹激波是由超音速等离子体流与星际介质剧烈相互作用产生的,据观测,它可以放大磁场 1 并将电子和质子加速到高度相对论速度 2 – 4 。在完善的扩散激波加速模型 5 中,相对论粒子通过反复的激波穿越而加速。然而,这需要一个单独的机制来预加速粒子以实现激波穿越。这被称为“注入问题”,它与电子尤其相关,并且仍然是激波加速中最重要的难题之一 6 。在大多数天体物理激波中,激波结构的细节无法直接解决,因此很难确定注入机制。这里我们报告了激光驱动等离子体流实验和相关模拟的结果,这些实验和模拟探测了在与年轻超新星遗迹相关的条件下湍流无碰撞激波的形成。我们表明,电子可以通过激波向相对论非热能转变过程中产生的小尺度湍流在一阶费米过程中得到有效加速,从而有助于克服注入问题。我们的观测为激波时的电子注入提供了新的见解,并为在实验室内控制研究宇宙加速器的物理原理开辟了道路。大多数天体物理激波都是无碰撞的,这意味着它们是由等离子体不稳定性形成的,等离子体不稳定性通过磁场放大、等离子体加热和粒子加速来耗散流能 6、7。因此,粒子注入与激波形成机制和激波产生的湍流磁场的性质密切相关。这些过程通常受激波马赫数(激波速度与环境阿尔文或声速之比)控制,但其控制方式尚不十分清楚。长期以来,航天器对地球弓形激波的现场测量已经形成了我们对中等阿尔文马赫数(MA ≈ 3 − 10)下无碰撞激波的理解(参考文献 8)。然而,由于这些奇异遥远激波的局部条件约束不充分,我们对超新星遗迹(SNR)激波相关的甚高马赫数范围(MA ≫ 10)的了解要有限得多,而且大部分都是通过数值模拟获得的 9 – 12。在过去十年中,人们在利用千焦耳级激光器产生超音速超阿尔文等离子体方面做出了巨大努力

带有...的湍流槽道流的解析分析
摘要 利用解析分析,我们研究了主要造成摩擦阻力的近壁面模式如何根据湍流槽道流动的平均速度分布形状而放大或抑制。根据 K¨uhnen 等人 (2018) 的最新研究结果,他们将平均速度分布修改得更平坦,并实现了显著的阻力减少,我们引入了两种类型的人为平坦湍流平均速度分布:一种基于 Reynolds 和 Tiederman (1967) 提出的湍流粘度模型,另一种基于层流的平均速度分布。特别注意的是,体积和摩擦雷诺数都保持不变,因此只能研究平均速度分布变化的影响。这些平均速度剖面在解析分析中用作基流,通过奇异值(即放大率)的变化来评估与近壁相干结构相对应的波数频率模式的响应。修正后的平均速度剖面的平坦度通过三种不同的测量方法量化。一般而言,发现更平坦的平均速度剖面会显著抑制近壁模式。此外,发现增加壁面附近平均速度梯度对于通过缓解临界层来抑制近壁模式具有重要意义。

中层大气中的湍流参数 - AMS 期刊
摘要:我们对大气流动的分层湍流和小尺度湍流状态进行了尺度分析,重点关注中间层。我们区分了旋转分层宏观湍流 (SMT)、分层湍流 (ST) 和小尺度各向同性 Kolmogorov 湍流 (KT),并指定了这些状态的长度和时间尺度以及特征速度。结果表明,浮力尺度 (L b ) 和 Ozmidov 尺度 (L o ) 是描述从 SMT 到 KT 的转变的主要参数。我们采用浮力雷诺数和水平佛劳德数来表征中间层的 ST 和 KT。该理论应用于高分辨率大气环流模型的模拟结果,该模型采用 Smagorinsky 型湍流扩散方案进行亚网格尺度参数化。该模型使我们能够推导出 KT 范围内的湍流均方根 (rms) 速度。研究发现,湍流 RMS 速度在夏季有一个最大值,在冬季有两个最大值。冬季 MLT 中的第二个最大值与二次重力波破碎现象有关。该模型得出的湍流 rms 速度结果与基于 MF 雷达测量的完全相关分析结果吻合良好。提出了一种基于中尺度直接能量级联思想的中尺度水平速度新尺度。后者对中尺度和小尺度特征速度的发现支持了本研究提出的观点,即中尺度和小尺度动力学在统计平均值上受 SMT、ST 和 KT 控制。
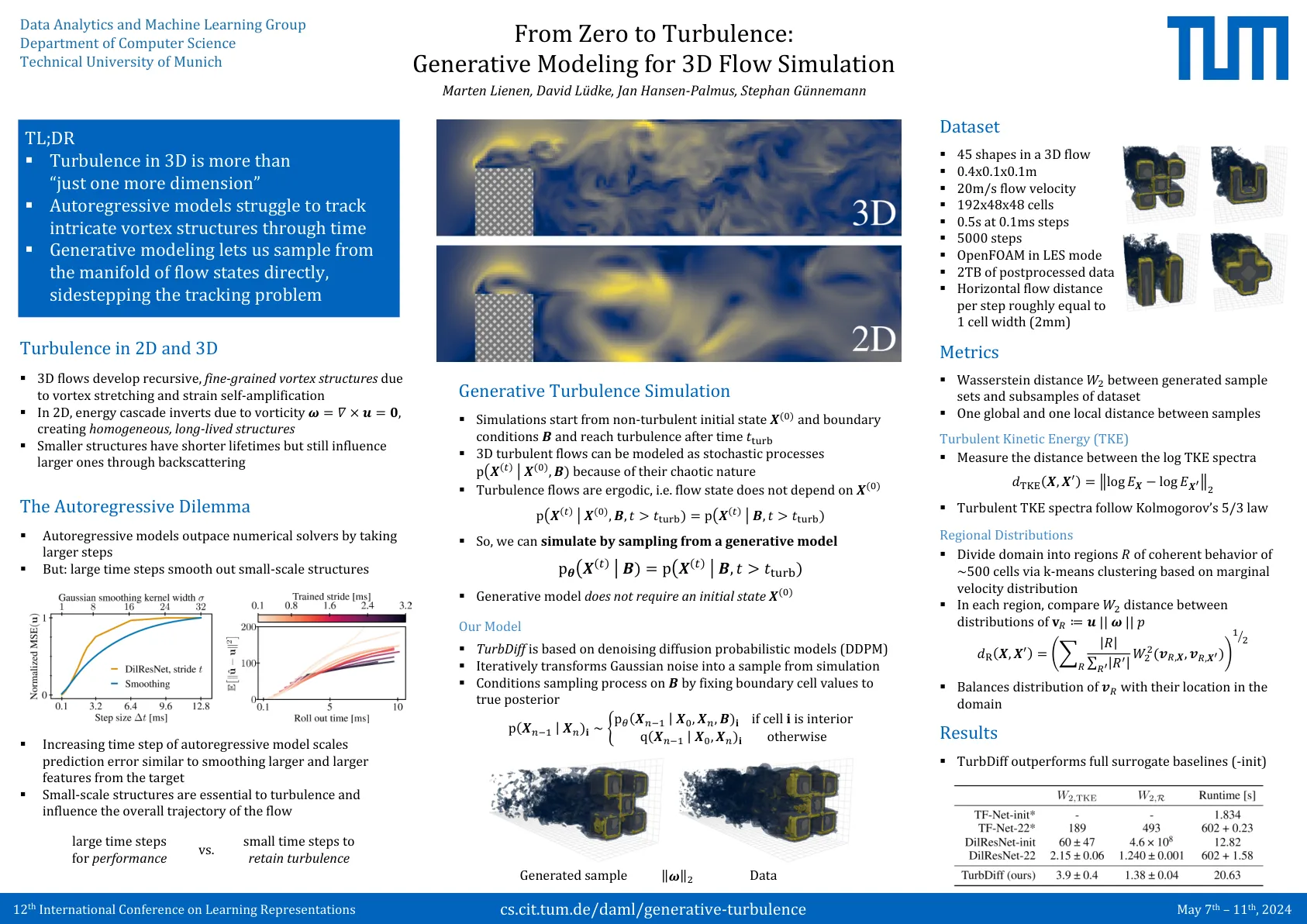
从零到湍流:3D流模拟的生成建模
tl; dr3D中的湍流不仅仅是“只有一个维度”自回归模型努力通过时间跟踪复杂的涡旋结构生成的建模使我们可以直接从流量状态的流动状态中进行样品,从而在跟踪问题
低湍流风洞设计和风力涡轮机尾流特性
图 1. 近尾流湍流强度分布 [1] ...................................................................................................... 2 图 2. 远尾流湍流强度分布 [2] ...................................................................................................... 3 图 3. 2.06 倍叶片直径处的相对湍流强度 [3] ...................................................................................... 4 图 4. 近尾流轴向速度云图(左)和切向速度云图(右) [4] ............................................................. 5 图 5. 2.5 倍涡轮机直径处的实验和 CFD(LES)湍流强度 [6] ............................................................. 6 图 6. CFD(LES)湍流图 7. 基本风洞示意图 ...................................................................................................................................... 8 图 8. 蜂窝类型 [7] ...................................................................................................................................... 11 图 9. 湍流减少因子 [10] ............................................................................................................................. 15 图 10. 用于模型风力涡轮机的 NACA 4412 叶片 ............................................................................................. 23 图 11. 模型风力涡轮机轮毂 .............................................................................................

飞机对地面剖面测量:湍流测量和光学系统性能建模
一系列飞行试验展示出一种测量空对地倾斜路径上路径分辨光学湍流量(如 C 2 n)的新方法。本文介绍了数据采集试验,试验涉及两束激光束在 8 公里倾斜路径上在一个轨道空中平台和一个静止地面终端之间传播。地面和飞行中的测量数据同时收集,并使用差分倾斜方差 (DDTV) 技术计算 C 2 n 剖面。本文介绍了 DDTV 技术,该技术能够对湍流强度进行路径分辨测量,从而得到 C 2 n 剖面。得到的湍流剖面揭示了最靠近飞机的统计数据中被认为是来自飞机边界层的气动光学污染。因此,气动光学环境的污染可以相对于其余大气传播路径进行量化。最后,本文介绍了将测量的大气湍流剖面与最先进的大气模型进行比较的分析。这些分析超越了 C 2 n 比较,并展示了测量与建模在关键定向能系统传播参数方面的比较,例如格林伍德频率、相干直径、里托夫数、等晕角、泰勒频率、开环抖动和开环斯特列尔比。在空对地和地对空定向能系统的背景下分析了斜路径湍流。

在近时环境中测量和分析大气光学湍流
摘要折射结构常数的索引,C,N 2表征了光湍流的强度,描述了传播电磁束穿过不均匀加热的湍流环境的破坏。为了改善预测模型,至关重要的是,对环境参数和光学湍流之间的关系有更深入的了解。到此为止,在马里兰州安纳波利斯的塞文河附近的切萨皮克湾建立了一个流水,890 m的闪烁仪链路。特定于闪光灯计的C n 2数据,以及在大约15个月的时间内收集了许多气象参数,以表征近野马环境中的闪烁仪链接。这种接近海洋连接的特征与在先前的陆地和开放海洋连接中观察到的特征不同。此外,现有用于预测开放式链路环境参数C N 2的宏观气象模型显示在近野马环境中的性能很差。虽然近海改编的宏观气象模型显示出较低的预测误差,但本研究表明,可以开发新的模型以减少近距离环境中的C N 2预测误差。完整的数据集,包括C N 2测量,据我们所知,是第一个延伸超过一年的测量之一。

量子启发计算推动湍流模拟取得重大进展
牛津大学的研究人员与汉堡、匹兹堡和康奈尔大学的同事合作,重新定义了这个问题,完全避免了直接解决和模拟这些湍流波动的需要。他们没有直接模拟这些麻烦的波动,而是将它们建模为根据概率分布函数分布的随机变量。模拟这样的概率分布使他们能够从流动中提取所有有意义的量(例如升力和阻力),而不必担心湍流波动的混乱。

应变率和耗散速率的湍流预热火焰中的耗散速率的演变
使用直接的数值模拟统计平面的湍流过滤量,分析了应变速率张量和热功能的耗散速率的成分的统计行为。HESSIAN的压力贡献以及组合的分子扩散和耗散项被发现在对角应变率成分的传输方程中起主要作用,并且具有小karlovitz数量的峰值动能的热能能量耗散速率。相比之下,领先顺序平衡在应变速率,涡度和分子耗散贡献之间保持较大的卡洛维茨数量,类似于非反应的湍流。与分子耗散贡献的幅度相比,压力和密度梯度之间的相关性以及压力梯度之间的相关性和压力HESSIAN在应变速率和耗散速率上弱化,而Karlovitz数量增加。这些行为已经用涡度,压力梯度和与应变率特征的压力HESSIAN特征向量的对齐方式进行了解释。还发现,在较高的karlovitz数字的增加时,还发现术语术语中的术语大小会增加,这是随着karlovitz数量的增加而增加的,这在详细的扩展分析的帮助下进行了解释。此扩展分析还解释了不同燃烧方案动能耗散率的主要顺序贡献。