XiaoMi-AI文件搜索系统
World File Search System溪步

ERCOT月度运营概述(2024年4月)
•南部地区的交通拥堵租金主要由北爱丁堡驱动到LOBO通用传输约束。•西区的交通拥堵租金主要是由从摩根溪(Morgan Creek)到冠军溪(Champion Creek)和苦力溪(Champion Creek)和摩根溪(Morgan Creek)到摩根溪(Morgan Creek)的345 kV意外事件驱动的,从摩根溪(Morgan Creek)到唐卡瓦(Tonkawa)开关的345 kV输电线。•“跨区域”类别由约束任一端的变电站在不同区域的情况下组成。
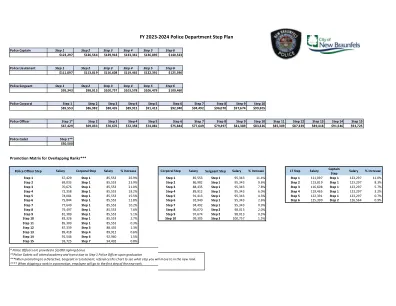
2023-2024 财年警察局分步计划
步骤 1 67,429 步骤 1 85,553 26.9% 步骤 1 85,553 步骤 1 95,343 11.4% 步骤 1 111,097 步骤 1 123,297 11.0% 步骤 2 69,033 步骤 1 85,553 23.9% 步骤 2 86,982 步骤 1 95,343 9.6% 步骤 2 113,819 步骤 1 123,297 8.3% 步骤 3 70,676 步骤 1 85,553 21.0% 步骤 3 88,435 步骤 1 95,343 7.8% 步骤 3 116,608 步骤 1 123,297 5.7% 步骤 4 72,358步骤 1 85,553 18.2% 步骤 4 89,912 步骤 1 95,343 6.0% 步骤 4 119,465 步骤 1 123,297 3.2% 步骤 5 74,081 步骤 1 85,553 15.5% 步骤 5 91,413 步骤 1 95,343 4.3% 步骤 5 122,391 步骤 1 123,297 0.7% 步骤 6 75,844 步骤 1 85,553 12.8% 步骤 6 92,940 步骤 1 95,343 2.6% 步骤 6 125,390 步骤 2 126,564 0.9% 步骤 7 77,649 步骤 1 85,553 10.2% 第 7 步 94,492 第 1 步 95,343 0.9% 第 8 步 79,497 第 1 步 85,553 7.6% 第 8 步 96,070 第 2 步 98,013 2.0% 第 9 步 81,389 第 1 步 85,553 5.1% 第 9 步 97,674 第 2 步 98,013 0.3% 第 10 步 83,326 第 1 步 85,553 2.7% 第 10 步 99,305 第 3 步 100,757 1.5% 第 11 步 85,309 第 1 步 85,553 0.3% 第 12 步 87,339 第 3 步 88,435 1.3% 第 13 步89,418 第 4 步 89,912 0.6% 第 14 步 91,546 第 6 步 92,940 1.5% 第 15 步 93,725 第 7 步 94,492 0.8%
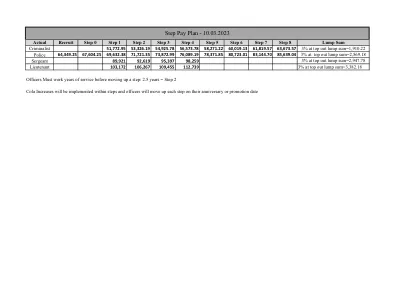
2024 步骤计划.xlsx
实际招募 第 0 步 第 1 步 第 2 步 第 3 步 第 4 步 第 5 步 第 6 步 第 7 步 第 8 步 刑事侦查员 51,772.95 53,326.19 54,925.78 56,573.78 58,271.22 60,019.13 61,819.57 63,673.57 警察 64,349.25 67,604.25 69,632.38 71,721.35 73,872.99 76,089.19 78,371.85 80,723.01 83,144.70 85,639.04 警长 89,921 92,619 95,397 98,259中尉 103,172 106,267 109,455 112,739

带稳定性增强器的无尾飞行器增量反步滑模轨迹控制
摘要:本文提出了一种增量反步滑模(IBS)控制器,用于无尾飞机的轨迹控制,该控制器具有未知干扰和模型不确定性。所提出的控制器基于无尾飞机的非线性动力学模型。提出了一种限制虚拟控制输入速率和幅度的稳定性增强器(SE)。稳定性增强器由两层组成。当虚拟控制输入接近边缘时,将激活第一层 SE 来修改轨迹跟踪误差;当虚拟控制输入超出边缘时,第二层 SE 将降低控制增益以确保虚拟控制输入尽快落在边缘内。在 SE 的帮助下,增量控制方法可以扩展到外环控制,而无需考虑内环系统的动态特性。此外,提出了一种状态导数自适应估计器,与 IBS 相结合,使控制器表现出良好的鲁棒性。最后,给出了两个仿真。第一次仿真表明系统对外部干扰和模型不确定性不敏感,第二次仿真证明了 SE 的有效性。
基于反步滑模的共轴旋翼飞行器轨迹跟踪控制算法及试验
摘要:针对共轴旋翼飞行器自主飞行过程中模型参数的不确定性、外界扰动及传感器噪声对飞行的影响,研究位置姿态反馈控制系统的鲁棒反步滑模控制算法,以解决未知外界干扰情况下飞行器的轨迹跟踪问题。本文针对未知飞行,建立了基于受扰共轴旋翼飞行器的非线性动力学模型。然后,设计了非线性鲁棒反步滑模控制器,分为共轴旋翼飞行器的姿态控制器和位置控制器两个子控制器。在控制器中引入虚拟控制,构造Lyapunov函数,保证各子系统的稳定性。通过数值仿真验证了所提控制器的有效性。最后通过飞行试验验证了反步滑模控制算法的有效性。
文章 带稳定性增强器的无尾飞机增量反步滑模轨迹控制
摘要:本文提出了一种增量反步滑模 (IBS) 控制器,用于无尾飞机的轨迹控制,该飞机具有未知的干扰和模型不确定性。所提出的控制器基于无尾飞机的非线性动力学模型。提出了一种稳定性增强器 (SE),它限制了虚拟控制输入的速率和幅度。稳定性增强器由两层组成。当虚拟控制输入接近边缘时,第一层 SE 将被激活以修改轨迹跟踪误差;当虚拟控制输入超过边缘时,第二层 SE 将降低控制增益以确保虚拟控制输入尽快落在边缘内。借助 SE,增量控制方法可以扩展到外环控制,而无需考虑内环系统的动态特性。此外,提出了一种状态导数的自适应估计器,与 IBS 一起,使控制器表现出出色的鲁棒性。最后,给出了两个仿真结果。第一次仿真表明系统对外界干扰和模型不确定性不敏感,第二次仿真证明了SE的有效性。
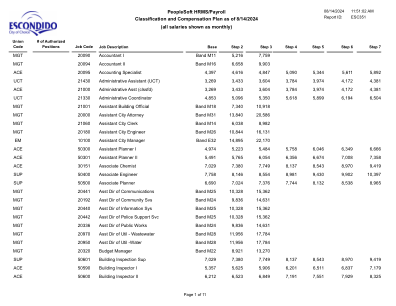
截至 2024 年 8 月 14 日的 PeopleSoft HRMS/薪资分类和薪酬计划
职位代码 职位描述 工会代码库 第 2 步 授权职位数 第 3 步 第 4 步 第 5 步 第 6 步 第 7 步
源头明矾溪 (HUC 05060001 14 02) 非点源实施策略
正如第 2 部分将详细讨论的那样,Alum Creek WAU 源头的 Alum Creek 受到了非点源 (NPS) 污染的影响。州和联邦 NPS 资金现在与符合美国环境保护署 (US EPA) 受损水域流域计划九个最低要素的战略实施规划密切相关。俄亥俄州环境保护署 (Ohio EPA) 建立了非点源实施战略 (NPS-IS) 框架和文档模板,以指导制定符合美国环境保护署九个最低要素的实施计划。这项 NPS-IS 计划解决了 Alum Creek WAU 源头的 NPS 损害问题,该计划由 Tetra Tech, Inc. 根据与 Morrow 县的合同制定。
小阿拉曼斯、特拉维斯和蒂克尔溪当地流域......
项目概述 2000 年,北卡罗来纳州水质部门将小阿拉曼斯溪列为受损河流,原因是河流生物评级较差。该溪面临的挑战包括水质差、生物退化、河岸植被丧失、河岸侵蚀和城市径流。在特拉维斯溪和蒂克尔溪中,人们也注意到河流生物条件较差,可能达到受损水域评级的水平。该流域受到河岸栖息地恶劣、郊区开发影响和农业径流的影响。2006 年至 2008 年间,这些流域一起被研究,以制定小阿拉曼斯溪、蒂克尔溪和特拉维斯溪地方流域计划 (LWP)。