XiaoMi-AI文件搜索系统
World File Search System漫游者
![arxiv:2212.01672v1 [cs.cv] 2022年12月3日](/simg/c\cc26ee16c78484b3826d3737f4bd2bdf2a9d3447.webp)
arxiv:2212.01672v1 [cs.cv] 2022年12月3日
摘要。这项工作的目的是介绍Marf,这是一项新颖的框架,能够使用Rover摄影机中的几种图像来合成火星环境。这个想法是生成火星表面的3D场景,以应对行星表面探索中的关键挑战,例如:行星地质,模拟导航和形状分析。尽管存在不同的方法来启用火星表面的3D重建,但它们依靠经典的计算机图形技术在重建过程中会产生大量计算资源,并且具有限制,并限制了重建以未见的场景并适应来自Rover Cameras的新图像。提出的框架通过利用神经辐射场(NERFS)来解决上述局限性,该方法通过使用一组稀疏的图像来优化连续的体积场景函数来合成复杂场景。为了加快学习过程的速度,我们用其神经图形图(NGP)替换了一组稀疏的漫游者图像,这是一组固定长度的vectors,这些vectors vectors vectors seal seal seal the vectors seal seal the venter thement Lengus的vectors seal seal theck in thecks of固定长度的vecters vecters the替换了以明显较小的尺寸保留原始图像的信息。在实验部分中,我们演示了由好奇的漫游者,持久漫游者和Ingenity直升机限制的实际火星数据集创建的环境,所有这些都在行星数据系统(PDS)上可用。

审查火星旋转火星无人机的关键技术
火星在太阳系中与地球相邻,并具有相似的物理维度和地形,在过去的45亿年中,在太阳系中,行星的出生和演变提供了全面的记录[1,2]。因此,火星探索对于扩大人类居住空间和探索生命的起源至关重要[3]。超过40多个火星勘探任务已在全球实施,超过80%的人未能实现其预期目标。甚至成功降落的火星流浪者都面临着被困在沙坑中或经历机械故障的风险[4]。在20世纪,前苏联和美国发起了火星调查,但未能完成其勘探任务[5]。在21世纪,美国再次发起了核动力火星漫游者,好奇心,并获得了全面的火星环境数据。研究人员发现,火星上存在着脆弱的气氛,这使得可以开发火星无人机来帮助火星漫游者在火星气氛中运作,从而引起了学者的国内和国际关注[6,7]。目前,火星无人机在国外开发的主要包括四种类型:浮游气球[8],固定的翼无人机[9],旋转翼无人机[10]和流动翼无人机[11],如图1所示。关于气球浮游的研究很早就开始了;但是,由于一旦释放而难以控制它们及其有限的感应能力,因此他们没有得到广泛的调查。一旦他们的能量耗尽固定翼无人机,例如ARES [9],只能在高海拔高度释放后执行单个反应。

土耳其 UNISEC (UZTED) 活动
部分活动 2022 • UZTED 成立和会议 • 为地区学生举办的模型卫星培训 • 安纳托利亚漫游者挑战赛,2022 年 7 月 22 日至 25 日 • 摩洛哥模型卫星培训,7 月 18 日至 22 日 • 美国宇航局太空展览 2021 年 12 月至 2022 年 3 月 • SHARJAHSAT1 项目和更多 CubeSat 项目 • Nlotusat 项目 • PAUSAT1 项目 • 第 11 届 NSAT 和第 8 届 UNISEC 全球会议 2022
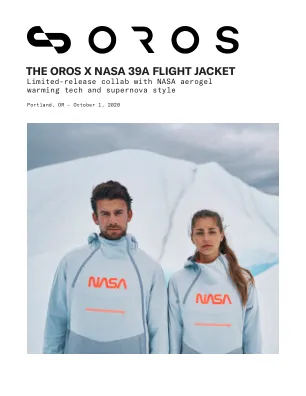
OROS X NASA 39A飞行夹克
Oros将NASA Space Tech带到地球上 - 39A飞行夹克具有SolarCore®以调节您的体温。什么是SolarCore®?这是外套的演变 - 这是防止火星漫游者发抖的原因。NASA几乎失重的气凝胶技术是Oros获得专利Solarcore®绝缘材料的基础。气凝胶是现有的最低导电固体,地球上最轻的固体……空气为99.8%!
月球上的bharat
chandrayaan-3由土著着陆器模块(LM),推进模块(PM)组成,其目的是开发和展示行星间任务所需的新技术。着陆器具有在指定的月球部位软地面的能力,并部署了漫游者在月球迁移过程中对月球表面进行原位化学分析的能力。着陆器和流动站有科学的有效载荷,可以在月球表面进行实验。PM的主要功能是将LM从发射车注射到最终月球100 km圆形极性轨道,并将LM与PM分开。除此之外,PM还具有一个科学的有效载荷形状,作为一个增值,已运行了Lander模块的分离后。Chandrayaan-3确定的发射器是LVM3 M4。

使用自动化增强摇杆机制
摇滚乐机制是机器人移动性的众所周知的设计,对于遍布坚固的地形的流浪者尤其有效。这项研究通过集成超声传感器,GPS模块和机械臂来提高自主性和多功能性,从而改善了传统的摇滚系统。该系统由Arduino Uno控制,并使用L298 2A电动机电路板由六个12V DC电动机提供动力,从而确保在充满挑战的环境中精确而可靠的运动。超声波传感器通过触发对象在50厘米以内时触发转弯来提供有效的障碍物检测。这是基于复杂AI的路径计划的更简单的选择。此外,GPS的集成增强了导航功能。机械臂允许与环境相互作用,从而实现了对象操纵和维修等任务。该项目旨在增强自主导航并改善基于传感器的障碍物,这是由实验方法的促进,包括在具有不同障碍距离的受控环境中使用超声波传感器测试漫游者的障碍物检测能力。在不同的地形上评估了流动站的导航,包括平坦的表面和不均匀的地形,以评估其移动性和稳定性。可选地,通过引导漫游者到达预定义的航位来测试GPS的精度,而在连续操作过程中监视功率效率以测量电池寿命和整体系统性能。结果表明。这项工作改善了在恶劣条件下的机器人自主权,并使用机械零件来减少农业,灾难响应机器人,自动矿业车辆,管道和基础设施检查,火山,深层洞穴和极端地形等领域的误差范围。

月球尘埃和粘附的仿真和实验研究
简介:自阿波罗时代以来,被尘埃污染被确定为卢纳尔和更常见的无空体的重要风险,探索误差([1] - [2])。对于未来月球的下一个任务,漫游者产生的尘埃动员和 /或机器人活动需要谨慎。它可能起源于地平线发光([3] - [4])。在这两种情况下,在粘附或尘埃的粘附性中发挥作用的机制均由静电力控制。这些力是由在灰尘和覆盖材料表面存储的电荷引起的。电荷载体是由月球等离子体环境产生的,阴影和阳光表面之间存在显着差异,并且也通过Triboelectric效应。缓解技术应受益于对这些过程的更好地说明。

波兰航天工业协会会员名录
SpacePL 目前涵盖波兰航天领域最重要的实体,这些实体是欧洲航天局 (ESA) 和欧洲航天领域主要公司的公认供应商。SpacePL 成员的主要成就包括:作为解决方案提供商参与超过 95 个不同的太空任务,例如 BRITE 卫星、STAR VIBE、Intuition-1 和 EagleEye 卫星,创建和维护 CreoDIAS 数据云,向 PIAST 卫星交付光学仪器,为 JUICE、ATHENA、InSight、Rosetta 和 Proba-3 等任务提供科学仪器,建造卫星平台,成功发射亚轨道火箭*,并组织欧洲漫游者挑战赛。一个重要方面是成员参与建立用于跟踪近地轨道物体的全球观测站系统,旨在建立太空态势感知 (SST)。

使用神经形态计算的浮点乘法
识别外星生命是太空研究中最令人兴奋和最具挑战性的努力之一。可以从生物元素,同位素和分子中推断出灭绝或现存生命的存在,但是需要准确和敏感的仪器来检测这些物种。在这张白皮书中,我们表明基于激光的质谱仪是原位鉴定原子,同位素和分子生物签名的有前途的仪器。给出了开发用于空间探索的激光射击/电离质谱(LIM)和激光解吸/电离质谱(LD-MS)仪器的概述。他们的用途是在火星场景和欧罗巴场景的背景下讨论的。我们表明,基于激光的质谱仪具有多功能和技术范围内的仪器,具有许多有益的特征可检测生命。fu-future行星着陆器和漫游者任务在其科学有效载荷中利用基于激光的质谱工具。

SPI 2024 年秋季简讯 (final_rev1) - CDN
研究教授 Pascale Ehrenfreund 博士继续担任空间研究委员会 (COSPAR) 主席。她还担任太空基金会董事会成员、世界经济论坛全球未来空间委员会联合主席以及喷气推进实验室咨询委员会董事会成员。2024 年夏天,Pascale 在亚洲度过了一段较长的时间,参加了在东京举行的 Spacetide 2024 会议和中国空间技术研究院 (CAST) 人类探索研讨会。作为 COSPAR 主席,她与 3000 名参与者共同组织了在韩国釜山举行的成功举行的第 45 届空间研究委员会 COSPAR 科学大会。她还是丹麦哥本哈根 UNIQUE 2024 和波兰克拉科夫第 10 届欧洲漫游者挑战赛 ERC 的主旨发言人,以及航空和