机构名称:
¥ 1.0
摇滚乐机制是机器人移动性的众所周知的设计,对于遍布坚固的地形的流浪者尤其有效。这项研究通过集成超声传感器,GPS模块和机械臂来提高自主性和多功能性,从而改善了传统的摇滚系统。该系统由Arduino Uno控制,并使用L298 2A电动机电路板由六个12V DC电动机提供动力,从而确保在充满挑战的环境中精确而可靠的运动。超声波传感器通过触发对象在50厘米以内时触发转弯来提供有效的障碍物检测。这是基于复杂AI的路径计划的更简单的选择。此外,GPS的集成增强了导航功能。机械臂允许与环境相互作用,从而实现了对象操纵和维修等任务。该项目旨在增强自主导航并改善基于传感器的障碍物,这是由实验方法的促进,包括在具有不同障碍距离的受控环境中使用超声波传感器测试漫游者的障碍物检测能力。在不同的地形上评估了流动站的导航,包括平坦的表面和不均匀的地形,以评估其移动性和稳定性。可选地,通过引导漫游者到达预定义的航位来测试GPS的精度,而在连续操作过程中监视功率效率以测量电池寿命和整体系统性能。结果表明。这项工作改善了在恶劣条件下的机器人自主权,并使用机械零件来减少农业,灾难响应机器人,自动矿业车辆,管道和基础设施检查,火山,深层洞穴和极端地形等领域的误差范围。
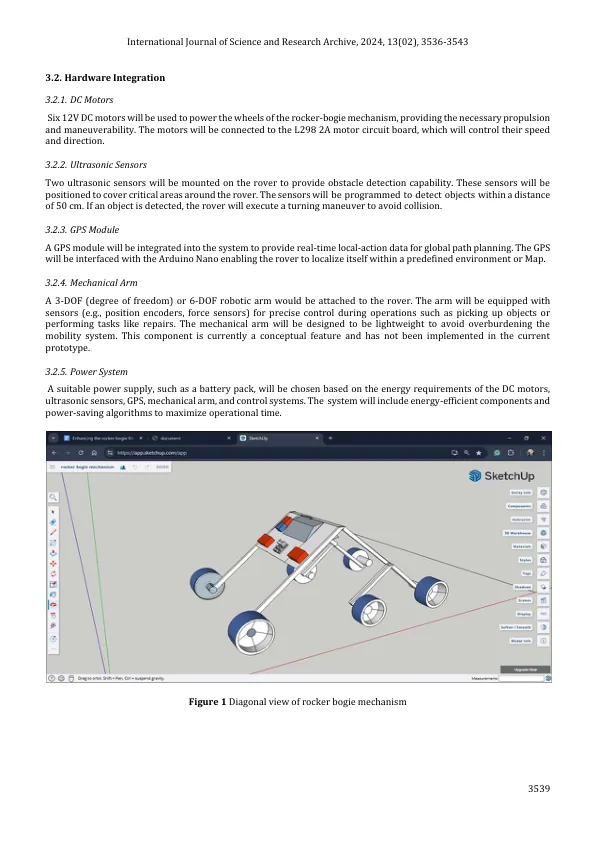
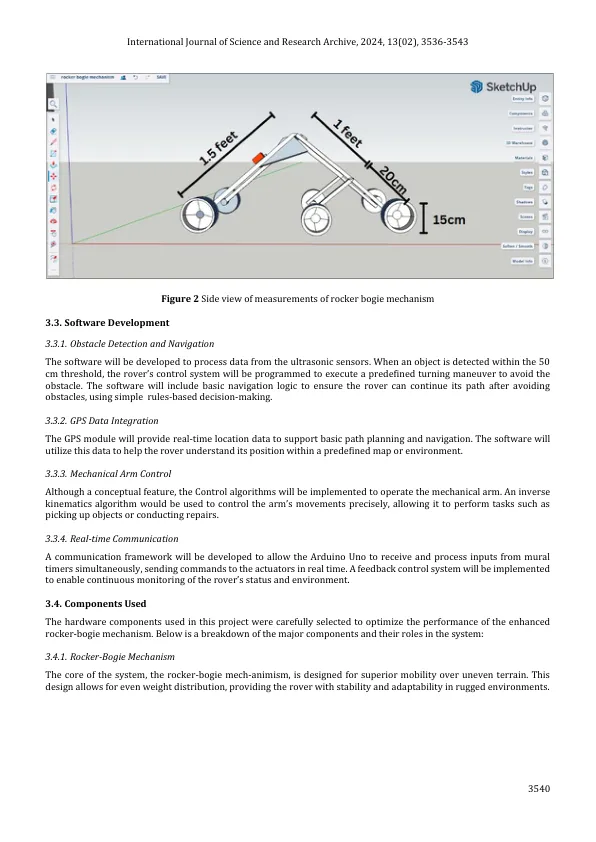
使用自动化增强摇杆机制
主要关键词


相关文件推荐