XiaoMi-AI文件搜索系统
World File Search System漫游者

Chandrayaan-3替代着陆点
印度的第三次月球任务Chandrayaan-3将在月球高纬度位置部署一个着陆器和一个流浪者,使我们能够对这种原始位置进行有史以来的首次原位科学调查,这将有可能提高我们对主要地壳形成和后续修改过程的理解。主要着陆点(PLS)位于69.367621°,32.348126°。作为偶然性,在几乎相同的纬度上选择了替代着陆点(ALS),但向西约450 km至PLS。在这项工作中,使用了有史以来最好的高分辨率Chandrayaan-2 OHRC Dems和Ortho-images进行了对ALS的地貌,组成和温度特征的详细研究,该数据是从Chandrayaan-1和On Incon each each each each each each eachine lunar侦察机获得的数据集。为了理解热物理行为,我们使用了一个完善的热物理模型。我们发现Chandrayaan-3 ALS的特征是平滑的地形,中央部分相对较高。als由埃拉托斯尼(Eratosthenian)年龄的莫雷特斯(Moretus-A火山口)主导,位于Tycho Crater的喷出毯上。ALS是一个科学有趣的地点,可以从Tycho和Moretus中取出弹射材料。然而,由于存在Eratosthenian年龄喷射材料,该地点是巨石富集,OHRC得出的危险图证实了ALS内的75%无危险区域,因此适合着陆和漫游者操作。带有APX和LIBS板上的Tycho弹出的痕迹将有助于理解ALS内的组成变化。基于位点的光谱和元素分析,Fe的重量百分比约为4.8(wt。%),毫克〜5 wt。%和Ca〜11 wt。%。在构图上,ALS类似于具有典型的高地土壤类型组成的PL。的空间和昼夜变异性约为40 K和〜175 K。与PL相比,ALS属于类似位置,但与PL相比,ALS显示出降低的白天温度和夜间温度的降低,这表明与PL相比具有独特的热物理特征。像PLS一样,ALS似乎也是科学调查的有趣场所,Chandrayaan-3有望为对月球科学的理解提供新的见解,即使它恰好降落在替代着陆点。

联邦登记册/卷。 90,第3号/2025年1月6日,星期一/...
不是无线电,而是利用KIV 700A进行加密和解密的内联加密者。16。AN/PYQ – 10简单关键加载器是用于安全接收,存储和传输兼容加密和通信设备之间的数据的手持设备。17。自动识别系统(AIS)应答器提供海上巡逻和搜救(SAR)飞机,能够在专用高频(VHF)数据链路上跟踪和识别配备AIS的船只。AIS是任何海上ISR网络的关键组成部分,并为海上当局提供了更好地协调空气和海上搜索,救援,监视和拦截操作的能力。18。L3HARRIS ROVER 6SI和TNR2X收发器提供实时,全动作视频(FMV)和其他网络数据,以提供情境意识,定位,战斗损害评估,监视,接力赛,车队对手的观察手术以及其他需要眼镜的情况。它提供了以前的漫游者版本的扩展频率和其他处理资源,从而增加了与众多载人和无人空降平台的协作和互操作性的提高。19。SAGE 750电子监视度量(ESM)系统是英国生产的数字电子智能(ELINT)传感器,该传感器分析电磁频谱以绘制主动排放的来源。使用高度准确的方向查找(DF)天线,Sage建立目标位置,并提供情境意识,提前警告威胁以及提示其他传感器的能力。20。21。SELEX SEASPRAY是一种活跃的电子扫描阵列(AESA)监视雷达,适用于从远程搜索到小目标检测的一系列功能。HISAR-300雷达提供了较高的远距离,实时,高分辨率成像以及陆上和海上监视任务,白天或黑夜以及在所有天气条件下的广泛搜索能力。22。SNC 4500自动电子监视度量(ESM)系统是一种数字电子智能(ELINT)传感器,该传感器分析电磁频谱以绘制主动排放的来源。使用高度准确的方向查找(DF)天线,SNC 4500建立目标位置,并提供情境意识,提前警告威胁以及提示其他传感器的能力。
AI在Space NASA
NASA利用人工智能(AI)来支持其任务和研究项目,分析数据,开发航天器和飞机的自主系统,以及自动化项目审查等任务。AI工具已被美国国家航空航天局(NASA)使用了数十年,利用机器学习来对大型数据集进行分类,预测和识别模式。这些工具使代理商能够简化决策,节省资源并更有效地利用其劳动力。例如,Pixl是持久漫游者上的X射线光谱仪,它采用自适应采样AI来检查火星上的岩石,从而精确地扫描了甚至小靶标,例如盐晶粒。NASA副管理人Pam Melroy强调,AI是一种强大的工具,称其已被用来安全有效地支持任务。 该机构继续开发和利用AI工具用于各种应用程序,包括检测异常,预测事件以及分析数据以揭示趋势和模式。 NASA希望领导人工智能开发国家安全,经济和社会NASA的AI工具可以快速扫描新陨石坑的图像,而在2020年,科学家证实,在AI将其确定为潜在地点之后,使用Hirise的新火山口使用。 该技术还用于分析大型数据集以识别需要注意的不同特征,用于异常检测或更改检测。 此过程已应用于各种NASA任务,例如预测藻类开花,飓风强度,珊瑚健康和追踪野火。 例如,拟议的欧罗巴陆地任务可以使用这些算法在Jovian Moon上寻找生活。NASA副管理人Pam Melroy强调,AI是一种强大的工具,称其已被用来安全有效地支持任务。该机构继续开发和利用AI工具用于各种应用程序,包括检测异常,预测事件以及分析数据以揭示趋势和模式。NASA希望领导人工智能开发国家安全,经济和社会NASA的AI工具可以快速扫描新陨石坑的图像,而在2020年,科学家证实,在AI将其确定为潜在地点之后,使用Hirise的新火山口使用。该技术还用于分析大型数据集以识别需要注意的不同特征,用于异常检测或更改检测。此过程已应用于各种NASA任务,例如预测藻类开花,飓风强度,珊瑚健康和追踪野火。例如,拟议的欧罗巴陆地任务可以使用这些算法在Jovian Moon上寻找生活。一组人员和承包商开发了新的算法,这些算法使空间工具可以更有效地处理数据,从而使他们能够快速自主地向地面上的科学家提供关键信息,以自主确定哪种地球现象最重要。目标是自动应对火山喷发,洪水或有害藻类的事件,改善观察结果和人类安全。开发AI驱动的空间探索工具对我们对宇宙的理解具有重要意义。chien是该领域的先驱,使用国际空间站(ISS)上的高级计算机制定了原型算法。他在各种处理器上测试了这些算法,包括嵌入式商用商业算法,例如Snapdragon 855和Myriad X,以及传统的航天器处理器PPC-750和Sabertooth。结果表明,这些嵌入式处理器适用于空间遥感,从而更容易将AI集成到新的任务中。通过处理板上的数据,Chien的算法阻止重要信息埋在较大的传输中。这项技术不仅在观察其他行星的仪器中都具有潜在的应用程序。团队还正在测试神经网络模型以解释火星卫星图像,这可以使卫星能够检测出新的冲击力,这是陨石的证据。“我们的漫游者的数据不仅将被传输回地球,而且还用来告知关于流动站可以安全探索的决定,” JPL数据科学家Emily Dunkel说。流动站可能会与神经网络结合使用这些强大的处理器来确定安全驾驶路线。团队使用Cognisat框架在无数X上部署模型,简化了板载深度学习模型的开发,并为NASA的太空任务铺平了道路。根据Ubotica高级工程师LéonieBuckley的说法,这种进步表明,硬件和软件系统已准备好进行太空探索。随着气候变化改变我们的星球,像Chien这样的系统使科学仪器能够与他们观察到的地球系统一样动态。现在正在将计算技术的快速进步纳入NASA任务中,反映了智能手机等个人设备中可用的巨大功能。

通过地面控制软件对自主系统的动态保证
I.引言案件越来越被公认为是对具有自主功能的复杂系统建立信任的一种方式[1]。保证案例是一种全面,可辩护和有效的理由,即系统将按照特定任务和操作环境的目的运作。具有自主能力的系统的这种理由通常基于各种概率定量[2]。由于这些系统运行的环境条件的动态性质以及自主系统本身的变化性质,这些概率量化在设计时间内不能简单地估算一次。相反,需要在系统操作期间不断评估它们,以确保保证案例的合理性有效。我们指的是将静态元素和动态元素作为动态保证情况(DAC)结合的保证案例。这种具有自主功能的复杂系统通常使用地面控制软件(GCS)组件部署,以实现远程操作。该系统是由单个单元还是单位舰队组成,已部署的分布式或远程环境中,GCS是对部署系统行为的窗口。它从系统接收遥测,向系统发出命令,并提供各种功能来可视化系统性能。我们提出了一个动态保证框架,其中GC是自主系统与其DAC之间的中继。GCS本身可用于使用传入遥测来跟踪单位特异性和系统范围的概率定量。我们将这些量化嵌入了整个DAC,作为可以由外部来源更新的变量。我们使用GC定期更新这些变量,这使我们能够不断评估正式定义的保证案例合同。我们在NASA AMES项目中展示了我们动态的保证框架,该框架旨在开发能够自主绘制其环境的流浪者队伍。流浪者合作工作,每个人都会为环境的不同部分收集数据。每个漫游者运行相同的核心飞行系统(CFS)[3]应用程序。Troupe使用Openc3 Cosmos [4]作为接地系统,并提倡[5]捕获DAC系统。我们使用该方法将保证案例与正式验证[6]与正式的运行时监控工具联系起来。特别是,我们使用FRET工具[7]来形式化倡导者中捕获的要求。然后,我们利用OGMA [8,9]和Copilot [10]工具及其与FRET的集成的功能来生成CFS监视器,并获得更新系统DAC所需的系统信息。我们展示了如何使用其红宝石脚本编辑器在宇宙中捕获漫游车特异性和系统范围的量化,并将其传递到倡导者中建模的DAC中。然后,我们展示了如何将这些传入变量嵌入DAC的不同部分以及如何观察到其更新的效果。

在火星气氛中,重型同位素的光化学耗竭Juan Alday 1,*,Alexander Trokhimovskiy 2,Manish R. Patel 1,Anna A. Fedor 摘要癌症干细胞(CSC)假设... 并行政策? 52全球新闻中新闻AI政策的比较研究 同行评审文件
摘要,由于大气逃离了数十亿年的空间,火星的大气相对于地球的沉重同位素富集。估计这种富集需要对所有大气过程有严格的理解,这些过程有助于逃避过程的下层大气和上层大气之间的同位素比的演变。我们结合了通过大气化学套件在车载上获得的CO垂直谱的测量值,Exomar痕量气臂上的预测和光化学模型的预测,找到了光化学诱导的分馏过程的证据,从而消耗了CO和O的重量(Δ13C = -160 C = -160±90±90±)和±90±)。在上层大气中,考虑到这一过程的逃脱分级因子降低了约25%,这表明C从火星的大气中逃脱了比以前想象的要少。在下部大气中,将这种13个耗尽的CO分馏掺入表面可以支持最近发现的火星有机物的非生物起源。1。主文本1.1简介的地貌和矿物学证据线条表明,液态水曾经在火星的表面1,2上很丰富,但是目前尚不清楚我们今天观察到的是什么气候条件,或者是什么使气候促进了气候过渡到气候过渡到干燥,低压大气的原因。在诸如N和H等几种物种的沉重同位素中富集表明,大气逃生是整个历史上大气的气候和大气组成的重要机制3,4。将测得的大气同位素比与进化模型相结合,可以估计火星早期大气中物种的丰度,这证明了对大气同位素组成5-7的透彻理解的价值。对大气从同位素组成的长期演变的准确估计取决于两个重要数量:过去和现在同位素比的测量以及净逃逸分级因子,这决定了重型 - 同位素富集的效率,这是大气逃避到空间的效率8,9。好奇心流动站对C和O大气中C和O的同位素组成的最准确测量是由好奇心漫游者制作的,这表明CO 2在CO 2中的重量同位素在类似地球的标准中(13 C/ 12 C = 1.046±0.004 VPDB和18 O/ 16 O = 1.046 O/ 16 O = 1.048 o/ 16 O = 1.048±0.0055

使用机器人解决方案Ezzedeen Alfataierge*,Pavel Golikov,Ahmad Ramdani,Abdulrahman Alshuhail -expe
使用机器人解决方案Ezzedeen Alfataierge*,Pavel Golikov,Ahmad Ramdani,Ahmad Ramdani,Abdulrahman Alshuhail -Expec高级研究中心,Saudi Aramco Aramco Seismic Seismic数据获取是一个劳动力密集的过程。利用机器人技术和自动化的进步,我们能够显着减少收购人员的环境足迹。本文介绍了已经开发并正在开发的技术,以实现自主地震数据采集系统的土地勘探系统。沙特阿美(Saudi Aramco)的地球物理机器人(SAGR)利用无人驾驶汽车(UAV)来扫描表面并提供准确的侦察报告。此信息用于部署一群配备了板载地震传感系统的自定义无人机,该系统称为自主地震采集设备(ASAD)。也得到了自主地震源船只的支持,以实现完全自主的采集系统。我们提出了过去几年所取得的进步,以支持自主收购系统各个组成部分的某些领域结果。引言机器人技术和人工智能/机器学习的进步使得能够开发出铺平道路数字化转型的伟大技术。这些努力在自治地震采集设备的土地和海洋探索方面很明显(Sudarshan等,2017; Chutia等,2017;Blacquiêedreand Berkhout,2013)。本文介绍了已开发的集成解决方案,这些解决方案是为了实现完全自主的地震收购人员。SAGR是一种无人飞行的飞机,旨在有效的侦察和测量(Golikov等,2023)。该技术利用AI/ML来实现自主分类和表面特征的识别,以优化有效的地震数据获取的地震调查设计(Ramdani等,2023)。SAGR系统的输出馈入ASAD的飞行和调查计划(Yashin等,2023)。目前正在开发其他技术以进一步发展这一愿景;开发可以在温和的地形(尤其是沙漠环境)中自动部署淋巴结系统的陆地漫游者。同样,陆虎可以与地震源设备耦合,这些设备将充当自主地震源船只,因此,完成了必要的工具,以在土地上实现自主地震采集系统,以高效,可持续性,更安全的地下图像和资源探索。

引用:Shen,J。X.,Chen,Y.,Sun,Y.,Liu,L.,Pan,Y。X.和Lin,W。(2022)。火星地区陆地类似物中的生物签名
摘要:几十年来,寻找火星生活的潜在迹象引起了强烈的国际兴趣,并导致了重大的计划和科学实施。显然,为了检测地球以外的潜在生命信号,基本问题,例如如何定义诸如“生命”和“生物签名”之类的术语。由于直接探索火星的高昂成本,地球上的火星样地区对于天体生物学研究是无价的目标,科学家可以在这里练习寻找“生物签名”并完善检测它们的方法。本评论总结了这项工作导致的科学仪器技术。仪器必须是我们的“眼睛”和“手”,因为我们试图识别和量化火星上的生物签名。可以应用于天体生物学的科学设备包括质谱仪和电磁基谱的光谱仪,氧化还原电势指标,圆形二色极仪,原位核酸序列,生命隔离/培养系统和成像器。这些设备以及如何解释它们收集的数据已在地球上的火星 - 分析极端环境中进行了测试,以验证它们在火星上的实用性。通过火星的完整进化历史预测生物签名的挑战,陆地火星类似物根据与不同火星地质时期的相似之处分为四个主要类别(早期的诺阿赫时期,早期的helsperian -hesperian -hesperian -hesperian -hesperian -hesperian -hesperian -earkon -earlian -earkon eright and opmand and opmaind opmair -earkon,noachian noachian noachian晚期,又是中间的公出了公之时,公之时又是中间的公出了公之时,并被公之时公出了。未来的任务建议将更加集中于火星的南半球,一旦航天器工程的进步解决了降落问题,因为对这些早期地形的探索将允许调查涵盖Mars通过其地质历史的更广泛的延续性。最后,本文根据地球上的火星类似物的四类类似物回顾了上面列出的一系列科学仪器范围的实际应用。我们回顾了适用于这些火星类似物中适用于自动机器人漫游者测试的工具的选择。从工程效率的考虑来看,火星流浪者应该配备尽可能少的仪器组件。因此,一旦定义了火星上的候选降落区,应根据每个火星登陆区域的已知地质,地球化学,地球化学,地球化学,地球化学和年代学特征来精心设计便携式工具套件。当然,如果火星样本返回任务成功,那么此类样品将允许在地球上实验室进行实验,这些实验比在火星上实现的可能性要全面更全面且价格合理。必须在寻找外星人生活中的假阳性和假阴性结论中,必须将多种多样和互补的分析技术组合,复制和仔细解释。是否可以在火星上检测到生命的签名的问题是最重要的。回答这个问题非常具有挑战性,但似乎已经变得易于管理。
文学中的人工智能和机器人理论。
科幻文学中对机器人的描绘,例如菲利普·迪克的《仿生人会梦见电子羊吗?》或威廉·吉布森的《神经漫游者》。文学中对机器人的文化和社会影响,例如唐娜·哈拉维的《机器人宣言》等文本中对身份、性别和权力关系的探索。使用机器人作为人类增强的隐喻以及围绕此类增强的伦理考虑,如马克·塞拉西尼的《生化尖兵》等小说中所见。大众媒体中对机器人的描述及其对公众对技术和人体的看法的影响,如《终结者》系列电影中所见。机器人在反乌托邦文学中的角色及其与控制、监视和抵抗主题的关系,如奥尔德斯·赫胥黎的《美丽新世界》等作品中所见。机器人挑战传统人性和人类状况观念的潜力,如士郎正宗的《攻壳机动队》等作品中所探讨的。机器人文学与残疾研究的交集,例如假肢和其他辅助技术在文学中的表现以及这些表现的文化含义。机器人如何被用来批判资本主义和消费主义文化,如爱德华·诺伊迈尔的《机械战警》等作品中所见。机器人与人工智能之间的关系,如亚历克斯·加兰的《机械姬》等文本中所探讨的。机器人对人类心理的影响,以及机器人模糊现实与虚拟界限的可能性,如尼尔·斯蒂芬森的《雪崩》等作品所示。文学作品中机器人的文化和社会影响,如唐娜·哈拉维的《机器人宣言》等文本中对身份、性别和权力关系的探索。给我一个摘要 唐娜·哈拉维的《机器人宣言》是一部开创性的女权主义理论著作,探讨了机器人在文学及其他领域的文化和社会影响。哈拉维认为,机器人可以看作是一种颠覆性的力量,挑战传统的身份、性别和权力关系观念。她认为,机器人代表着人类与机器的融合,是自然与文化的融合,模糊了两者之间的界限。通过这样做,他们挑战了固定、基本身份的概念,反而为混合性和多样性开辟了新的可能性。哈拉维还探讨了机器人如何被用作统治工具,特别是在殖民主义和帝国主义的背景下。她认为,了解机器人的文化和社会影响对于创建一个更加公正和公平的社会至关重要,这个社会承认身份的流动性和复杂性,并抵制压迫和统治的力量。总体而言,《机器人宣言》是一部发人深省、影响深远的作品,它继续塑造我们对技术、文化和社会之间关系的理解。请添加主题介绍

Charles F. Bolden Jr。
首先是海军陆战队少将,然后作为NASA管理员,小查尔斯·博尔登(Charles F. Bolden Jr.2009年,巴拉克·奥巴马(Barack Obama)总统任命博尔登(Bolden)为第十二名NASA管理员,这使他只是第二次担任该职位的宇航员。领导NASA时,Bolden负责从航天飞机系统到新的勘探时代的过渡,完全专注于国际空间站(ISS)和航空技术开发。Bolden领导了太空发射系统和Orion Crew Capsule的开发。Bolden还监督了向商业空间倡议的转变,以处理ISS的补给。他创建了NASA的太空技术任务局,负责开发将使未来探索任务成功的技术。Bolden的任期包括火星好奇的漫游者登陆的胜利,这是Juno任务的成功,该任务有助于我们更完全了解地球木星,增加了负责地球观测任务的卫星数量,并持续进展,朝着预期的2021年詹姆斯·韦伯(James Webb)空间的预期推出。不要忘记NASA中的第一个“ A”代表航空公司,Bolden还将注意力集中在NASA的航空计划上,以及该机构开发可以比以往更快,更远,更安静和更绿色的飞机开发飞机的目标。在他是NASA宇航员的职业生涯中,Bolden乘坐四个航天飞机任务飞行,在太空中登录了680个小时。1986年,他驾驶的航天飞机哥伦比亚(STS-61C)和1990年的航天飞机发现(STS-31) - 部署了哈勃太空望远镜的任务。他还曾在1992年在Atlantis航天飞机上担任任务指挥官(STS-45),并于1994年(STS-60)担任航天飞机发现。Bolden在1986年的航天飞机挑战者灾难之后,还曾在约翰逊航天中心担任NASA安全部门。Bolden也有漫长而杰出的军事生涯。美国的毕业生海军学院,鲍尔登在越南战争期间飞行了100多次战斗任务。后来他是海军航空测试中心系统工程和罢工飞机测试局的测试飞行员。在1994年完成了宇航员的服务后,他曾在海军学院担任中级船员的助理指挥官,并在1998年担任科威特(Kuwait)沙漠雷霆行动的海洋远征军指挥官。他上次担任加利福尼亚州海军陆战队Miramar海军陆战队航空公司第三海军飞机翼的总指挥官,然后他从海军陆战队退休。Bolden拥有南加州大学系统管理科学硕士学位。他的过去荣誉包括国防杰出的服务奖章,国防上级服务奖章,杰出的飞行十字架,空中奖章,三个NASA
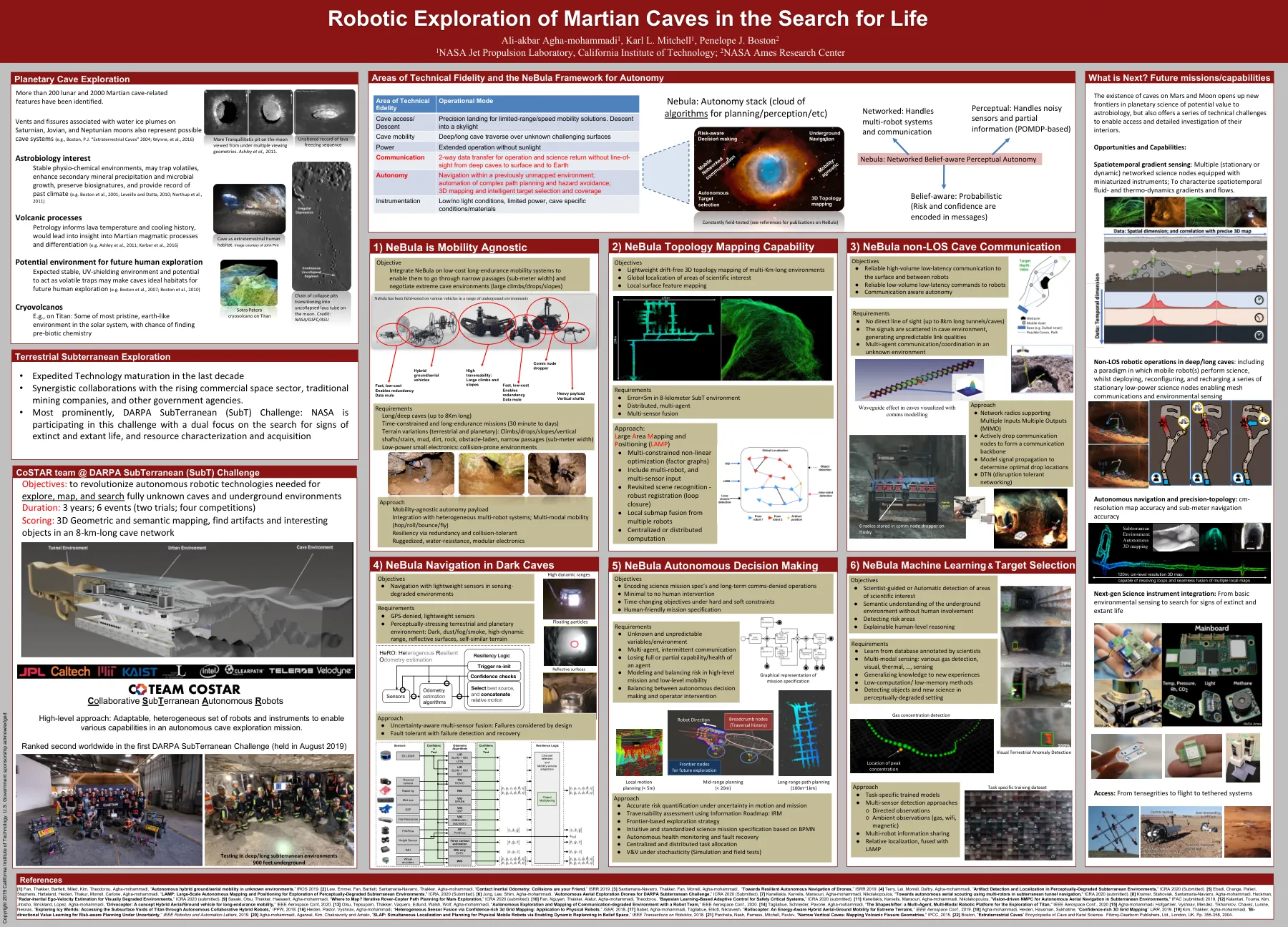
机器人探索火星洞穴寻找生命
[1] Fan,Thakker,Bartlett,Miled,Kim,Theodorou,Agha-Mohammadi,“自动杂种地面/未知环境中的空中移动性”,IROS 2019。[2] Lew,Emmei,Fan,Bartlett,Santamaria-Navarro,Thakker,Agha-Mohammadi,“接触惯性探测:碰撞是您的朋友,” ISRR2019。[3] Santamaria-Navarro,Thakker,Fan,Morrell,Agha-Mohammadi,“迈向无人机的弹性自动导航”,ISRR2019。[4] Terry,Lei,Morrell,Daftry,Agha-Mohammadi,“感知衰落的地下环境中的伪影检测和定位”,ICRA 2020(提交)。[5] Ebadi,Change,Palieri,Stephens,Hatteland,Heiden,Thakur,Morrell,Carlone,Carlone,Agha-Mohammadi。“灯:大规模的自主映射和定位,用于探索感知衰落的地下环境,” ICRA,2020年(提交)。[6] Jung,Lee,Shim,Agha-Mohammadi,“ DARPA地下挑战的自动空中勘探无人机”,ICRA 2020年(提交)。[7] Kanellakis,Karvelis,Mansouri,Agha-Mohammadi,Nikolakopoulos,“在地下隧道导航中使用多旋转器使用多旋翼的自主空中搜寻”,ICRA 2020(提交)。[8] Kramer,Stahoviak,Santamaria-Navarro,Agha-Mohammadi,Heckman,“视觉上降解环境的雷达惯性自我效率估计”,ICRA 2020(提交)。[9] Sasaki,Otsu,Thakker,Haesaert,Agha-Mohammadi,“在哪里映射?迭代的漫游者 - 弯曲器路径计划火星探索,” ICRA 2020(提交)。[10] Fan,Nguyen,Thakker,Alatur,Agha-Mohammadi,Theodorou。“基于贝叶斯学习的自适应控制对安全关键系统的自适应控制”,ICRA 2020(提交)。[11] Kanellakis,Karvelis,Mansouri,Agha-Mohammadi,Nikolakopoulos,“在地下环境中进行自主空中航行的视觉驱动的NMPC,IFAC(提交),[12],[12] [12]长期耐药性活动的概念混合空中/地面车辆。[13] Otsu,Tepsuporn,Thakker,Vaquero,Edlund,Walsh,Walf,Wolf,Agha-Mohammadi,“与机器人团队对贫困环境的自动探索和映射”[14] Tagliabue, Schneider, Pavone, Agha-mohammadi, “ The Shapeshifter: a Multi-Agent, Multi-Modal Robotic Platform for the Exploration of Titan, " IEEE Aerospace Conf., 2020 [15] Agha-mohammadi, Hofgartner, Vyshnav, Mendez, Tikhomirov, Chavez, Lunine, Nesnas, “探索冰冷的世界:通过自动协作混合机器人访问泰坦的地下空隙,” IPPW,2018。[16] Heiden,牧师,Vyshnav,Agha-Mohammadi,“通过置信度丰富的3D网格映射:应用于物理机器人的异质传感器融合:Iser,2018年。[17] SABET,AGHA-MOHAMMADI,TAGLIABUE,ELLIOTT,NIKRAVESH,“滚筒式:能源吸引能量的混合杂种空中地形迁移率对极端地形”,IEEE Aerospace Conf。,2019年。[18] Agha-Mohammadi,Heiden,Hausman,Sukhatme,“信心丰富的3D网格映射” IJRR,2019年。[19] Kim,Thakker,Agha-Mohammadi,“不确定性下的风险感知计划的双向价值学习”,IEEE机器人和自动化信,2019年。[21] Parcheta,Nash,Parness,Mitchell,Pavlov,“狭窄的垂直洞穴:映射火山裂缝几何形状”,IPCC,2015年。pp。[20] Agha-Mohammadi,Agarwal,Kim,Chakravorty和Amato,“ Slap:通过在信仰空间中启用动态重建的物理移动机器人的同时本地化和计划,”机器人技术的IEEE Transactions,2018。[22]波士顿,“洞穴和喀斯特科学的百科全书”。Fitzroy-Dearborn Publishers,Ltd。,英国伦敦。355-358,2004。