XiaoMi-AI文件搜索系统
World File Search System灵巧性

触觉渗透性:在触觉设备中添加孔可改善灵巧性
图1:(a)提高了针对指尖的触觉设备的可用性和最小化,研究人员离开了厚厚的执行器(例如振动电动机),而是专注于薄设备 - 成功的例子是电动刺激。这些可以设计为薄,即使用力膜覆盖了电极膜(例如,合规性或宏观功能),它仍然可以感觉到某些感觉。但是,我们认为这还不够,并且还应平衡触觉设备的损害,从而使感觉到现实世界与它具有虚拟感觉的准确程度。因此,我们提出并评估如何在电动设备中添加孔,从而导致:(1)改善触觉特征的感知; (2)改善掌握任务中的力控制(b)我们的方法显着提高了触觉用户在混合现实中的灵活活动(包括操纵工具)的能力。


操纵人体工程学和机器人手术 - 叙事评论
屏幕靠近手(4)。其他可视化符合人体工程学的考虑因素包括立体声音,感觉齐射,视觉空间能力和视觉疲劳。外科医生的物理分离是Rs期间流动中断(FDS)的主要贡献者,这可能会导致错误率提高(5)。可能会反对FD的干预措施包括团队培训,更好的手术室空间配置,带读书的标准化沟通分类,技术实施,支持弹性和使用清单。机器人援助对认知工作量的影响很复杂(6)。更好相关的姿势,可视化和操纵人体工程学可能会促进将认知资源委派给身体任务的需求,但是这可能会被降低与身体分离,沟通困难,控制更多工具,有限的视野和缺乏具有相认为的反馈相关的情境意识所抵消。机器人系统通过具有七个自由度(DOF),支点消除,震颤过滤和运动缩放的铰接仪器提供了更好的操纵人体工程学(7)。与LS相比,这些机器人操纵益处的存在已被证明可使右手的灵巧性增加55%,而左手的灵巧性增加了45%(8)。在模拟设置中,具有二维视觉的机器人缝合任务中的基于技能的中值错误从腹腔镜缝合任务中的23个下降到8.5。这些因素可能会影响研究中研究的有效性。目标关于机器人系统操纵益处的研究主要是在模拟设置中进行的,并使用运动学数据和不同经验水平的外科医生的工作时间进行了评估。

3D可打印的梯度晶格设计用于多态性...
摘要 - 人的手指通过结合刚度不同的结构(从软组织(低)到肌腱和软骨(中)到骨骼(高),实现了异常的灵巧性和适应性。本文探讨了开发具有相似多态性特征的机器人手指。具体来说,我们建议使用通过体素大小和单位细胞几何形状参数的晶格配置,以优化并实现具有高粒度的精细调谐刚度。这种方法的一个重要优势是在单个过程中打印设计的可行性,消除了对刚度不同的元素的手动组装的需求。基于这种方法,我们提出了一种新颖的人类手指和一个软抓手。我们将后者与刚性操纵器集成在一起,并证明了挑选和放置任务的有效性。
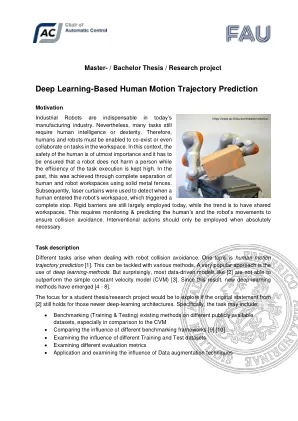
深度学习的人类运动轨迹预测
工业机器人在当今的制造业中是必不可少的。尽管如此,许多任务仍然需要人类的智力或灵巧性。因此,必须启用人和机器人在工作区中的任务共存甚至协作。在这种情况下,人类的安全至关重要,必须确保在任务执行效率较高的同时,机器人不会伤害人。过去,这是通过使用固体金属围栏完全分离人和机器人工作区来实现的。随后,使用激光窗帘来检测人类何时进入机器人的工作区,这触发了一个完整的停止。僵化的壁垒今天仍然在很大程度上被使用,而趋势是共享工作区。这需要监视和预测人类和机器人的运动,以确保避免碰撞。绝对必要时才应采取干预行动。
第一个地质学家?
摘要非洲人类祖先的进化脑生长速率(脑化)在CA上大幅增加。3.5 MA。 粗糙的石工具首先出现在东非东部的河流沉积物中,大约在这个时候,工具辅助屠宰场的证据也出现在动物骨骼上。 早期人类素在选择岩石类型的岩石类型方面具有选择性,而偏爱岩石,当破碎时会产生锋利耐用的边缘的平面或脊髓骨折。 加上屠宰场,可能已经使用了早期的石材工具来处理根和块茎,而磨料的石头可能已被用来锐化长矛和挖棍。 不管特定的工具使用如何,有效的石材选择和石工具制造和使用所必需的认知和灵巧性的进化压力仅与具有适当机械性能的岩石区域相关,就像与东非赖特系统相关的地质年轻火山岩区域。 第一批地质学家意识到不同的岩石类型,它们的机械性能及其在自然景观中的分布也是特定地质环境的产物。3.5 MA。粗糙的石工具首先出现在东非东部的河流沉积物中,大约在这个时候,工具辅助屠宰场的证据也出现在动物骨骼上。早期人类素在选择岩石类型的岩石类型方面具有选择性,而偏爱岩石,当破碎时会产生锋利耐用的边缘的平面或脊髓骨折。加上屠宰场,可能已经使用了早期的石材工具来处理根和块茎,而磨料的石头可能已被用来锐化长矛和挖棍。不管特定的工具使用如何,有效的石材选择和石工具制造和使用所必需的认知和灵巧性的进化压力仅与具有适当机械性能的岩石区域相关,就像与东非赖特系统相关的地质年轻火山岩区域。第一批地质学家意识到不同的岩石类型,它们的机械性能及其在自然景观中的分布也是特定地质环境的产物。

现代医学中的人工智能
计算机系统模仿人类智能的灵巧性就是人工智能。人工智能已经改革了医学各个领域的诊断和治疗的精确度和能力。人工智能似乎在医学诊断中发挥着重要作用。使用人工智能的计算机系统有助于评估医学图像和大量数据。这项研究旨在确定基于人工智能的技术如何改革医学艺术。人工智能使提供者能够提高效率和整体医疗保健。较新的机器学习技术引领自动诊断系统。医学成像、自动临床决策支持等医学领域在人工智能技术方面取得了重大进展。随着诊断和预后的改善,人工智能有能力彻底改变医学的各个领域。人工智能有其自身的局限性,无法取代床边的临床医生。在不断发展的现代医学数字世界中,医生需要支持人工智能,而不是担心它取代训练有素的医生来改善医疗保健。
面对协作机器人 - Mary Ann Liebert, Inc.
简介 协作机器人(即 cobots)被引入工业装配线,通过称为人机协作 2 (HRC) 的交互过程来提高生产力和支持工人 1。在以制造系统数字化转型为特征的工业 4.0 革命背景下,3–5 协作机器人和操作员共享工作空间和任务。2,6–10 HRC 旨在将协作机器人的准确性和不知疲倦(即长时间重复性任务)与人类的灵活性 2 和灵巧性(例如解决问题、创造力)相结合。3 为了符合工作空间安全条件,11,12 协作机器人将定义一组考虑工作环境和操作员的空间位置和动作的动作(即“教学”)。工人通过特定界面(即示教器)、创新输入设备(例如智能摄像头、语音识别系统)和直接接触来控制这些操作。7,13,14 此外,考虑用户对协作机器人的看法对于提高 HRC 至关重要。事实上,协作机器人可以支持操作员开展工作活动 13,15–18 并可以在认知层面承受它们(例如,减少记忆工作量,帮助决策)。8,19,20 这些功能在劳动力年龄不断增加的时代非常重要。15,16

一项针对体现AI
摘要 - 深度学习在许多领域都表现出了非凡的成功,包括计算机视觉,自然语言处理和强化学习。这些领域中的代表性人工神经网络涵盖了卷积神经网络,变压器和深Q网络。基于单峰神经网络,已经引入了许多多模型模型,以解决一系列任务,例如视觉问题答案,图像字幕和语音识别。体现AI中指令跟随机器人策略的兴起刺激了一种新型的多模式模型的开发,称为视觉语言动作模型(VLAS)。他们的多模式能力已成为机器人学习的基础元素。已经提出了各种方法来增强特征,例如多功能性,灵巧性和概括性。一些模型专注于精炼特定组件。其他人旨在制定旨在预测低级行动的控制政策。某些VLA充当高级任务计划者,能够将长途任务分解为可执行子任务。在过去的几年中,出现了无数的vlas,这反映了体现AI的迅速发展。因此,必须通过全面的调查来捕获不断发展的景观。
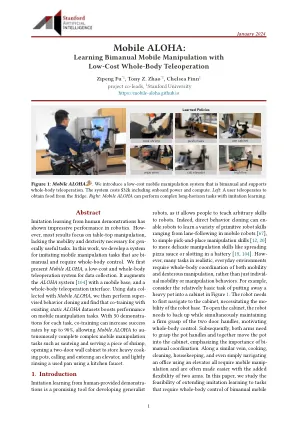
Mobile-Aloha.pdf
从人类示威中学习的抽象模仿学习在机器人技术中表现出了令人印象深刻的表现。但是,大多数结果都集中在桌面操纵上,缺乏一般有用的任务所需的活动性和灵巧性。在这项工作中,我们开发了一个模仿手动且需要全身控制的移动操作任务的系统。我们首先提出移动Aloha,这是一种用于数据收集的低成本和全身远程操作系统。它以移动基础和全身远程操作接口增强了Aloha系统[104]。使用与移动Aloha共同指定的数据,然后我们执行超级可见的行为克隆,并发现与现有的静态Aloha数据集共同培训可以提高移动操作任务上的性能。通过每项任务进行50次演示,共同培训可以将成功率提高90%,使移动的Aloha能够完全完全完整的复杂的移动操纵任务,例如炒和供应一块虾,打开了一个两门壁柜,可以将重型厨师,打电话给厨房,并使用厨房使用,并用来供电,并用来供电,并用来供电。