XiaoMi-AI文件搜索系统
World File Search System物体

英国外层空间物体登记处
《登记公约》的目的之一是确保联合国秘书长建立并维护发射到外层空间物体的中央登记处。因此,当发射太空物体时,《登记公约》要求“发射国”通知联合国。公约将“发射国”定义为从其领土发射物体的国家或促成其发射的国家(或其国民促成其发射)。

6D姿势估计未见物体的工业增强现实
土地利用变化和气候变化被认为是当前生物多样性下降的两个主要驱动力。保护区有助于保护景观免受其他拟人化障碍,并在正确设计后可以帮助物种应对气候变化的影响。当旨在保护区域生物多样性而不是保护焦点物种或景观元素时,受保护区需要覆盖区域生物多样性的代表性,并在功能上连接,从而促进网络中受保护区域中的个体移动,以最大程度地提高其有效性。我们开发了一种方法来定义有效的保护区,以生态代表性和功能连通性作为标准在区域网络中实施。我们在加拿大Que´bec的Gaspe'sie地区说明了这种方法。我们使用基于个体的模型模拟了濒临灭绝的大西洋天际驯鹿人群(rangifer tarandus caribou)的运动,以确定基于这种大型哺乳动物的功能连通性。我们创建了多个保护区网络方案,并评估了其生态反映性和对当前条件的功能连接性。我们选择了最有效的网络方案的子集,并提取了其中包括的保护区域。生态代表性与创建网络的功能连接之间的权衡。在最有效的网络中反复选择了可用的区域。最大化生态代表性和功能连通性的保护区代表了在有效保护区域网络中实施的合适区域。这些领域确保了该区域生物多样性的代表样本被网络涵盖,并最大程度地提高了保护区域之间和内部的随着时间的流动。

抗LGI1脑炎中的核心脑脊液生物标志物概况 使用5- ethynyl-2 确定S相持续时间 Coldflux超导EDA和TCAD工具项目 生成媒体:签名,隐喻和经验 6D姿势估计未见物体的工业增强现实 在气候变化下的保护区域设计网络中整合功能连接:驯鹿案例研究 无事件移动对象从移动自我车辆 请注意地图!从传感器估算在线HDMAP时,请考虑现有地图。 负责任的创新和数字平台:在线食品交付的情况 具有摩擦触点的软机器人的可微分模拟 胆管癌
抽象目的是将富含抗完全胶质素的神经胶质瘤激活1(LGI1)脑炎的患者与神经退行性[阿尔茨海默氏病(AD),Creutzfeldt – Jakob疾病(CJD)和原发性精神病(Psy)disororders(Psy)disororders进行比较。患有LGI1脑炎的方法是从2010年至2019年之间的法国参考中心数据库中追溯选择的,如果可以使用CSF进行生物标志物分析,包括Tau(T-TAU),磷酸化的TAU(P-TAU),Amyloid-BetaAβ1-42,Neurofilofiliments Lights(NF)(NF)(NF)作为常规实践的一部分发送以进行生物标志物测定的样本,并被正式诊断为AD,CJD和PSY,用作比较器。结果二十四名LGI1脑炎患者与39 AD,20 CJD和20 PSY进行了比较。在LGI1脑炎和PSY患者之间,在T-TAU,P-TAU和Aβ1-42水平中没有观察到显着差异。LGI1脑炎(231和43 ng/L)的T-TAU和P-TAU水平明显低于AD(621和90 ng/L,P <0.001)和CJD患者(4327和4327和4327和55 ng/L,P <0.001和P <0.001和P <0.01)。NF L浓度(2039 ng/L)与AD相似(2,765 ng/L),与PSY相比(1223 ng/L,P <0.005),但明显低于CJD(13,457 ng/l,p <0.001)。较高的NF L。可以得出CSF生物标志物水平和临床结果之间的相关性。结论LGI脑炎患者的NF L水平高于PSY,与AD相当,并且在发出癫痫发作时,提示与癫痫发作有关的轴突或突触损伤时甚至更高。

比较颤音和皮肤拉伸的触觉反馈,以将虚拟物体的空间信息传达给盲目的VR用户
感知虚拟对象的空间信息(例如,方向,距离)对于寻求不可思议的虚拟现实(VR)体验的盲人用户至关重要。为了促进盲人用户的VR访问权限,在本文中,我们研究了两种类型的触觉提示(多余的提示和皮肤伸展线索)在传达虚拟物体的空间信息时,当应用于盲人手的背侧时。我们与10个盲人用户进行了一项用户研究,以调查他们如何使用定制的触觉机构在VR中感知静态和移动对象。我们的结果表明,盲人用户可以在接收皮肤拉伸线索时更准确地理解对象的位置和移动,这是对纤维曲折提示的。我们讨论了两种类型的触觉提示的利弊,并以设计建议的设计建议,以实现VR可访问性的未来触觉解决方案。

基于人工智能的物体检测和报警系统的开发...
这种实时人体物体检测是朝着自动创建 AI 报警系统迈出的一步,在安全和更好的应急响应方面具有广泛的应用。YOLO 算法的实施如今确保了实时高效准确的物体检测,增强了人机交互。尽管该系统可能在受控环境中具有实验经验,但通过不断调整和用户反馈,可以确保在各种现实情况下的有效性。该领域的未来工作将侧重于增强在困难条件下的检测能力并改进界面以供公众使用。这包括在安全、监视和搜索救援行动中引入该技术的其他应用。随着 AI 技术的不断发展,此类系统将适应改善应急响应和整体公共安全。

USV-YOLO:用于检测环保无人容器表面浮动物体的算法
摘要 - 水资源是人类的基础。表面浮游物体的精确检测是环境保护无人机进行河流清洁操作的主要先决条件。针对当前目标检测算法在复杂场景和低特征识别能力下对水面上的小目标的不良适应性,本文提出了水表面流动物体检测算法USV-yolo,这实现了在内陆河流复杂条件下充电对象的准确识别和检测。最初,设计了一种新颖的C2F频道模块。它优化了特征信息的利用,并通过顺序融合和串联从瓶颈层发出的特征信息来提高检测浮动物体的准确性;其次,该设计介绍了GS-EVC模块,该模块通过合并GSCONV和SHUF-flof flof flof flof flof flof flof flof flof flof flof flopl oterations介绍了表面炉的原始特征信息的利用,增强了远程特征信息之间的依赖性,并增强了特征识别能力;最终,骨干网络中的标准卷积被全尺寸动态ODCONV代替。其中的加权注意机制可以适应复杂目标的特征提取,从而进一步提高了网络的检测精度。实验是在开源数据集(浮动waste-i和flow-img)上进行的,实验结果表明,本文中的USV-Yolo算法提高了平均检测精度,地图50和MAP 50-95,分别提高了4.3%和6.1%,比原始网络更好,这是其他经典的目标。

71%的消费者希望将生成AI集成到他们的购物体验中
报告方法论Capgemini对北美,欧洲和亚太地区的12个国家/地区的18岁以上的12,000名消费者于2024年进行了调查。关于Capgemini Capgemini是一个全球的商业和技术转型伙伴,帮助组织加速其双重过渡到数字和可持续的世界,同时对企业和社会产生切实的影响。这是一个在50多个国家 /地区的340,000个团队成员组成的负责任和多样化的团体。具有超过55年的遗产,Capgemini受到客户的信任,可以解锁技术的价值,以满足其业务需求的整个广度。它提供了端到端的服务和解决方案,利用了从战略和设计到工程的优势,所有这些都取决于其在AI,Cloud和Data中的市场领先能力,以及其深厚的行业专业知识和合作伙伴生态系统。该集团报告了2023年全球收入为225亿欧元。获得您想要的未来| www.capgemini.com关于Capgemini研究所,Capgemini研究所是Capgemini在所有数字化方面的内部智囊团。该研究所发表了有关数字技术对大型传统业务的影响的研究。团队借鉴了Capgemini专家的全球网络,并与学术和技术合作伙伴紧密合作。该研究所在印度,新加坡,英国和美国设有专门的研究中心。它连续六次被独立分析师的研究质量排名第一,这是一个行业。请访问我们https://www.capgemini.com/researchinstitute/

71% 的消费者希望将生成式人工智能融入到他们的购物体验中
报告方法 凯捷于 2024 年 10 月和 11 月对北美、欧洲和亚太地区 12 个国家/地区的 12,000 名 18 岁以上的消费者进行了调查。 关于凯捷 凯捷是全球业务和技术转型合作伙伴,帮助企业加速向数字化和可持续世界的双重转型,同时为企业和社会创造切实影响。它是一家负责任且多元化的集团,在 50 多个国家/地区拥有 340,000 名团队成员。 凯捷拥有超过 55 年的悠久历史,深受客户信赖,能够释放技术价值,满足他们所有的业务需求。它提供端到端的服务和解决方案,利用从战略和设计到工程的优势,所有这些都得益于其在人工智能、云和数据方面的市场领先能力,以及其深厚的行业专业知识和合作伙伴生态系统。该集团公布的 2023 年全球营收为 225 亿欧元。 获得您想要的未来 | www.capgemini.com 关于凯捷研究院 凯捷研究院是凯捷内部的智库,致力于研究所有数字化问题。该研究院发布有关数字技术对大型传统企业影响的研究报告。该团队利用凯捷全球专家网络,与学术和技术合作伙伴密切合作。该研究院在印度、新加坡、英国和美国设有专门的研究中心。该研究院连续六次被独立分析师评为全球研究质量第一,创下行业第一。请访问我们的网站 https://www.capgemini.com/researchinstitute/

在计划潜在危险物体(PHO)缓解的计划中的不确定性量化。 C. S. Plesko 2,S。A。Becker 2,M。B。Boslough 1,W。K。
简介:行星防御缓解尝试需要大量的高级任务计划和任务模拟。模拟工作是使用流体力学代码和状态数据方程进行的[1]。这些发布前模拟的结果用于任务计划中,以预测定位和时机要求,并量化为特定对象施加必要变化(ΔV)所需的能量和输送机制。2022 DART任务是对动力学影响缓解的过程的故意测试,从氢化校准和预测开始[2,3],并与影响实验进行比较[4]。考虑通过对峙核破裂缓解的情况存在类似的不确定性,尤其是在不可能进入目标对象围绕轨道的情况下。在这些快速接口的情况下,可能无法预测目标相对于爆发的方向,并且从爆发到目标的距离可能会产生严重的不确定性,这是由于硬件能力和目标位置不确定性引起的。不确定性,例如,目标的质量,形状和材料特性可能会给ΔV预测带来进一步的不确定性,但我们对它们的效果有不完全的理解。通过减少赋予pho的能量的不确定性来最大程度地减少pho的不确定性,减少了缓解尝试的模拟,这对任务设计构成了不可行的约束。 在这里,我们探讨了缓解模拟对已知不确定性的敏感性,以建立可行的任务设计约束。减少了缓解尝试的模拟,这对任务设计构成了不可行的约束。在这里,我们探讨了缓解模拟对已知不确定性的敏感性,以建立可行的任务设计约束。
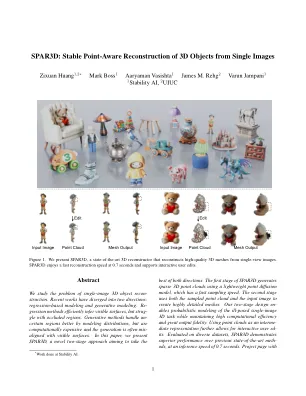
SPAR3D:从单幅图像实现稳定的点感知三维物体重建
从单目图像重建3D物体是计算机视觉领域的一个基本问题。高效的重建系统能够开辟广泛的应用领域,包括增强现实、电影制作和制造业。单目3D重建也是一个复杂的逆问题:虽然可见表面可以通过阴影估计,但预测遮挡表面需要强大的3D物体先验知识。我们的领域已经在两个不同的方向上出现了分歧:前馈回归[2、10、19、24、25、27、37、53、54、59-62、65、66、69]和基于扩散的生成[6、8、9、26、29、31-35、39、46-48、68、71]。尽管在两个方向上都取得了重大进展,但每个方向都有根本的局限性。基于回归的模型在粘附图像中的可见表面方面非常有效,并且推理速度通常很快。然而,它们对图像和 3D 之间的双射映射做出了过于简单的假设。这一假设在学习目标中引入了模糊性,导致遮挡区域的表面和纹理估计不佳。另一方面,基于扩散的方法是生成性的,不能预测统计平均值。然而,在建模高分辨率 3D 时,它们在推理时的迭代采样计算效率低下。此外,[27] 等先前的研究表明,扩散生成的 3D 模型与输入图像中可见表面的对齐效果较差。我们如何才能兼顾两者的优点而又避免它们的局限性?有鉴于此,我们提出了 SPAR3D,它将 3D 重建过程分为两个阶段:点采样阶段和网格划分阶段。点采样阶段使用扩散模型生成稀疏点云,然后是网格划分阶段,将点云转换为高度详细的网格。我们的主要思想是将不确定性建模转移到点采样阶段,在此阶段,点云的低分辨率允许快速迭代采样。随后的网格划分阶段利用局部图像特征将点云转换为具有高输出保真度的详细网格。减少点云网格划分的不确定性进一步促进了逆渲染的无监督学习,从而减少了纹理中的烘焙照明。我们的两阶段设计使 SPAR3D 的性能显著优于以前的回归方法,同时保持了高计算效率和对输入观测的保真度。我们方法的一个关键设计选择是使用点云来连接两个阶段。为了确保快速重建,我们的中间表示需要轻量级,以便能够高效生成。另一方面,它应该为网格划分阶段提供足够的指导。这