XiaoMi-AI文件搜索系统
World File Search System物体
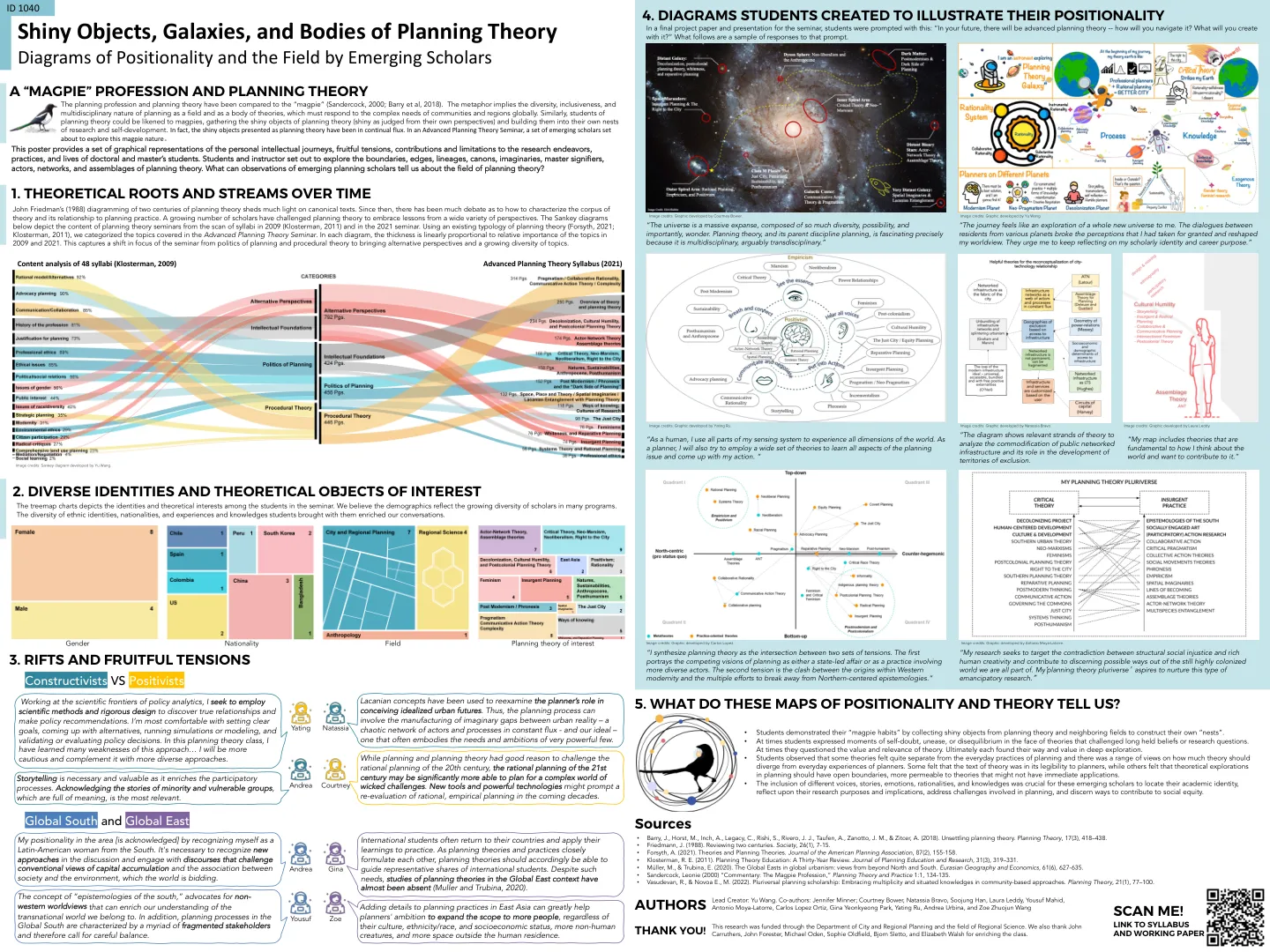
闪亮物体、星系和规划理论的主体
规划专业和规划理论被比作“喜鹊”(Sandercock,2000;Barry et al,2018)。这个比喻意味着规划作为一个领域和一套理论的多样性、包容性和多学科性,它必须响应全球社区和地区的复杂需求。同样,规划理论的学生可以被比作喜鹊,收集规划理论的闪亮物体(从他们自己的角度来看是闪亮的),并将它们建成他们自己的研究和自我发展的巢穴。事实上,以规划理论形式呈现的闪亮物体一直在不断变化。在高级规划理论研讨会上,一群新兴学者着手探索这种喜鹊性质。这张海报提供了一组图形表示,展示了博士生和硕士生的个人智力旅程、富有成果的紧张关系、研究工作、实践和生活中的贡献和局限性。学生和导师开始探索规划理论的边界、边缘、谱系、经典、想象、主要符号、参与者、网络和集合。新兴规划学者的观察能告诉我们关于规划理论领域的什么信息?

局部磁异常中铁磁性物体的探测...
在地质研究中,人们采用多种方法来勘探自然资源。大面积研究时会使用飞机、直升机和无人机 ( 无人驾驶飞机 ) 。研究中采用重力、电磁和磁力方法。重力法可以测量地球重力的微小变化 [1]。现代重力仪的灵敏度小于 1 mGal (1 Gal = 10 −2 m/s 2 )。重力仪可以测量接近 10 −6 g 水平的地球重力变化。莫斯科的 Gravimetric Technologies Ltd. 公司是少数几家领先的高灵敏度重力仪制造商之一 [2]。安装在 Cessna 404 飞机上的 GT-1A 重力仪如图 1 所示 [3]。自然资源矿床也是通过应用电磁法发现的。第一个电磁系统出现并开发于 20 世纪 20 年代的斯堪的纳维亚半岛、美国和加拿大。电磁法用于测量土壤的电导率。电磁系统安装在飞机或直升机上。大型线圈由直升机牵引或由飞机携带。线圈中的电流脉冲产生强磁场(一次磁场),该磁场穿透地球各层(图 2)。随时间变化的磁场在土壤中产生涡流。关闭线圈中的电流后,只有涡流产生磁场(二次磁场)

基于视觉的实时空中物体定位和... - arXiv
摘要 — 本文主要研究基于视觉的无人机导航障碍物检测与跟踪问题。通过将物体检测和跟踪有效地集成到动态卡尔曼模型中,开发了一种单目图像序列的实时物体定位和跟踪策略。在检测阶段,通过每帧图像背景连通性提示计算出的显著性图自动检测和定位感兴趣的物体;在跟踪阶段,采用卡尔曼滤波器对物体状态进行粗略预测,然后通过结合显著性图和两个连续帧之间的时间信息的局部检测器进一步细化预测。与现有方法相比,所提出的方法不需要任何手动初始化跟踪,运行速度比同类最先进的跟踪器快得多,并且在大量图像序列上实现了具有竞争力的跟踪性能。大量实验证明了所提出方法的有效性和优越性能。

预测Cislunar空间中物体的监护权
在地面域中同样重要,因此从业者继续尝试延长可以将特定轨道编号保留到特定目标的时间长度。在地面域中发现有用的一种方法称为特征辅助跟踪(FAT)(有时在文献中也称为签名辅助跟踪(SAT)或分类辅助跟踪(CAT))。脂肪是一种在雷达系统中最常见的技术,尽管它也在光学跟踪系统中使用了。在脂肪中,正常的监视模式通过雷达模式大小中断,该模式仅产生仅取决于目标相对于雷达传感器的姿势和速度的测量值。模式,例如合成孔径雷达(SAR)和高范围分辨率雷达(HRR),因为一旦考虑到姿势和LOS速度,它们就会产生一些不变的签名。可以在[1]中找到有关这种方法的一种实现的详细讨论。一种简单的方法来了解问题以及如何使用脂肪来帮助解决该问题,如图1。两个目标接近交叉点,并结束一段时间。也许其中一个或多个停在十字路口,让另一个人不受阻碍。对于接地移动目标指示器(GMTI)雷达模式,这是用于接地监视雷达的典型度量观察模式,这意味着一个或两个目标在停止时消失在混乱中。即使它们足够放慢,它们也会消失在混乱中。某个时候,目标到达另一个十字路口并通过不同的路径退出。由于两个目标都可能已经停止或至少足够缓慢地移动,并且由于它们暂时靠近一段时间,并且雷达仅在定期进行定期对目标进行采样,而不是仅根据度量观测值来确定沿哪个路径沿着哪个目标撤离。如果使用脂肪,则目标离开交叉点并进行了足够分离(取决于传感器的分辨率)后,将采用HRR模式并用于与为每个目标维护的签名库匹配。假设两个目标的匹配性能足够不同,则可以解决歧义,并且如果需要,可以将适当的轨道编号重新分配到这些目标时。

基于颜色和形状的物体排序的机器人臂
对象分类机器人臂正在彻底改变我们的流程,使它们更有效,并为未来的自动化奠定了基础。它正在开辟我们处理和分类材料的新时代,尤其是随着技术的不断发展。但是,它确实有挑战。机器人臂必须适应不同类型的对象和现实世界环境,这可能很棘手。研究人员一直在努力提高其功能,以确保其顺利集成到各种环境中。随着技术的进步,该机器人部门的潜在应用正在扩大。它可用于详细的装配线,甚至用于个性化的物流。这项技术的持续发展强调了其在转型行业中的重要性。我们正在走向智能机器人系统将播放
通过... 实现的亚波长物体的光学计量
摘要。几十年来,显微镜和各种形式的干涉仪一直用于通常大于光波长λ的物体的光学计量。然而,由于衍射极限,亚波长物体的计量被认为是不可能的。我们报告说,通过分析物体散射的相干光的衍射图案,使用深度学习分析,可以测量亚波长物体的物理尺寸,精度超过λ/800。使用633nm激光,我们表明可以以0.77nm的精度测量不透明屏幕中亚波长狭缝的宽度,这对电子束和离子束光刻的精度提出了挑战。该技术适用于集成计量和加工工具的智能制造应用中纳米尺寸的高速非接触式测量。
使用人工智能进行物体检测:综述
印度阿萨姆邦阿萨姆市中心大学 摘要:图像处理是一种处理图像以修饰图像或从中提取有用信息的技术。它可以定义为通过使用复杂算法对图像进行技术分析。在这里,图像用作输入,有用的信息作为输出返回。与此同时,人工智能行业也正迎来巨大的繁荣曲线。据《福布斯》报道,人们相信到 2020 年,人工智能和机器学习可以在广告和销售方面创造额外的 2.6 万亿美元价值,在生产和交付链规划方面创造高达 2 万亿美元的价值。索引词:人工智能、物体检测、卷积神经网络、R-CNN [1]、Fast R-CNN [2]、Faster R-CNN [3]、YOLO [4]。
局部磁异常中铁磁物体的检测......
在地质研究中,人们采用多种方法来发现自然资源。在大面积研究中,人们使用飞机、直升机和无人机 (Un nm Anned V ehicle)。重力、电磁和磁力方法都用于研究。在重力方法中,可以测量地球重力的极小变化 [1]。现代重力仪的灵敏度小于 1 mGal (1 Gal = 10 −2 m/s 2 )。重力仪可以测量接近 10 −6 g 水平的地球重力变化。 莫斯科的 Gravimetric Technologies Ltd. 公司是少数几家领先的超灵敏重力仪生产商之一 [2]。图 1 [3] 显示了安装在 Cessna 404 飞机上的 GT-1A 重力仪。应用电磁法也可以发现自然资源矿藏。第一个电磁系统出现并于 20 世纪 20 年代在斯堪的纳维亚半岛、美国和加拿大开发。电磁法用于测量土壤的电导率。电磁系统安装在飞机或直升机上。大线圈由直升机牵引或由飞机携带。线圈中的电流脉冲产生强磁场(初级场),该磁场穿透地球各层(图2)。时变场在土壤中产生涡流。线圈电流切断后,只剩下产生磁场的涡流(二次

端到端多模式物体检测 - Robert Babuska
摘要 — 为视觉任务设计的深度神经网络在遇到训练数据未涵盖的环境条件时往往容易失败。多传感器配置的有效融合策略可以通过利用不同传感器流的冗余来增强检测算法的鲁棒性。在本文中,我们提出了用于在恶劣照明条件下进行 2D 物体检测的传感器感知多模态融合策略。我们的网络学习以标量权重和掩码的形式估计每种传感器模态的测量可靠性,而无需事先了解传感器特性。将获得的权重分配给提取的特征图,随后将其融合并传递给变压器编码器-解码器网络以进行物体检测。这对于不对称传感器故障的情况至关重要,可以防止任何悲剧性后果。通过大量实验,我们表明,所提出的策略在 FLIR-Thermal 数据集上的表现优于现有的最先进方法,将 mAP 提高了 25.2%。我们还针对 RGB-D 多模态检测任务提出了一种新的“r-blended”混合深度模态。我们提出的方法在 SUNRGB-D 数据集上也取得了令人满意的结果。

光学遥感图像中的物体检测调查
变化检测 (Bontemps et al., 2008; Chen and Hay, 2012; Contreras et al., 2016; Dissanska et al., 2009; Doxani et al., 2012; Doxani et al., 2008; Hussain et al. .,2013;Im 等,2008;等,2014;沃尔特,2004);土地覆盖和土地利用制图,包括植被、树木、水、住宅等。 (Baker 等人,2013 年;Benz 等人,2004 年;Blaschke,2003 年;Blaschke 等人,2011 年;Blaschke 等人,2008 年;Contreras 等人,2015 年;D'Oleire-Oltmanns 等人,2014 年德皮尼奥等人,2012;等,2013;Drăguţ 和 Eisank,2012;Eisank 等,2011;Kim 等,2011; Woodroffe,2011;Macfaden 等,2012;Myint 等,2011; 2012;Tzotsos 等,2011;Xie 等,2008;Zhou 和 Troy,2008;滑坡测绘(Feizizadeh 等,2014;Li 等,2015b;Martha 等,2010;Martha 等,2011;Martha 等,2012;Stumpf 和 Kerle,2011)。