XiaoMi-AI文件搜索系统
World File Search System物体

SFOD:脉冲融合物体探测器 - CVF 开放存取
事件相机具有高时间分辨率、高动态范围、低功耗和高像素带宽等特点,为特殊环境中的物体检测提供了独特的功能。尽管有这些优势,事件数据固有的稀疏性和异步性对现有的物体检测算法提出了挑战。脉冲神经网络 (SNN) 受到人脑编码和处理信息方式的启发,为这些困难提供了潜在的解决方案。然而,在当前的实现中,它们在使用事件相机进行物体检测方面的性能受到限制。在本文中,我们提出了脉冲融合物体检测器 (SFOD),一种基于 SNN 的简单有效的物体检测方法。具体而言,我们设计了一个脉冲融合模块,首次实现了应用于事件相机的 SNN 中不同尺度特征图的融合。此外,通过整合我们在 NCAR 数据集上对主干网络进行预训练期间进行的分析和实验,我们深入研究了脉冲解码策略和损失函数对模型性能的影响。从而,我们建立了基于 SNN 的当前最佳分类结果,在 NCAR 数据集上实现了 93.7% 的准确率。在 GEN1 检测数据集上的实验结果表明,SFOD 实现了 32.1% 的当前最佳 mAP,优于现有的基于 SNN 的方法。我们的研究不仅强调了 SNN 在事件摄像机物体检测中的潜力,而且推动了 SNN 的发展。代码可在 https://github.com/yimeng-fan/SFOD 获得。
ACRP 报告 38 – 了解空域、物体及其对机场的影响
J. Barry Barker,肯塔基州路易斯维尔河城交通管理局执行董事 Allen D. Biehler,宾夕法尼亚州交通部哈里斯堡局长 Larry L. Brown, Sr.,密西西比州交通部杰克逊市执行董事 Deborah H. Butler,弗吉尼亚州诺福克市诺福克南方公司规划执行副总裁兼首席信息官 William A.V.Clark,加利福尼亚大学洛杉矶分校地理系教授 Eugene A. Conti, Jr.,北卡罗来纳州交通部部长,罗利 Nicholas J. Garber,弗吉尼亚大学夏洛茨维尔分校土木工程系 Henry L. Kinnier 教授兼交通研究中心主任 Jeffrey W. Hamiel,明尼苏达州明尼阿波利斯市大都会机场委员会执行董事 Paula J. Hammond,华盛顿州交通部秘书,奥林匹亚 Edward A.(Ned) Helme,华盛顿特区清洁空气政策中心总裁 Adib K. Kanafani,加利福尼亚大学伯克利分校土木工程系 Cahill 教授 Susan Martinovich,内华达州交通部主任,卡森城 Debra L. Miller,堪萨斯州交通部秘书,托皮卡 Sandra Rosenbloom,亚利桑那大学图森分校规划教授 Tracy L. Rosser,沃尔玛公司企业交通副总裁, Inc.,路易斯安那州曼德维尔 Steven T. Scalzo,首席运营官,海洋资源集团,华盛顿州西雅图 Henry G. (Gerry) Schwartz, Jr.,董事长(已退休),Jacobs/Sverdrup Civil, Inc.,密苏里州圣路易斯 Beverly A. Scott,总经理兼首席执行官,亚特兰大都会区快速交通管理局,乔治亚州亚特兰大 David Seltzer,Mercator Advisors LLC 负责人,宾夕法尼亚州费城 Daniel Sperling,土木工程和环境科学与政策教授;交通研究所所长;加州大学戴维斯分校能源效率中心临时主任 Kirk T. Steudle,密歇根州交通部主任,兰辛 Douglas W. Stotlar,Con-Way, Inc. 总裁兼首席执行官,密歇根州安娜堡 C. Michael Walton,德克萨斯大学奥斯汀分校 Ernest H. Cockrell 工程百年讲席教授

通过有形物体重新设想(通用)航空驾驶舱的互动
摘要 降低飞行员的工作量是通用航空 (GA) 面临的一个关键挑战。GA 是指航空业的一个分支,其特点是飞行员非专业和非商业操作。目前,这些飞行操作中的数字技术支持主要限于消费类平板电脑和导航应用程序。研究人员和从业人员预计,在不久的将来,通过混合现实应用程序和其他机器支持系统,飞行员的支持将会增加。控制、过滤和处理 GA 驾驶舱中引入的大量新数字数据将需要新的有形输入和输出技术和设备。虽然这在小型 GA 飞机的紧凑和不稳定的驾驶舱中尤其如此,但我们看到了设计用于其他航空分支甚至自主或无人机操作的有形设备的机会。为此,我们希望召集关注未来航空驾驶舱设计的研究人员和从业人员,并制定一项战略,为 (通用) 航空中的人机交互和有形交互研究开发专门的科学渠道。

6D姿势估计未见物体的工业增强现实
土地利用变化和气候变化被认为是当前生物多样性下降的两个主要驱动力。保护区有助于保护景观免受其他拟人化障碍,并在正确设计后可以帮助物种应对气候变化的影响。当旨在保护区域生物多样性而不是保护焦点物种或景观元素时,受保护区需要覆盖区域生物多样性的代表性,并在功能上连接,从而促进网络中受保护区域中的个体移动,以最大程度地提高其有效性。我们开发了一种方法来定义有效的保护区,以生态代表性和功能连通性作为标准在区域网络中实施。我们在加拿大Que´bec的Gaspe'sie地区说明了这种方法。我们使用基于个体的模型模拟了濒临灭绝的大西洋天际驯鹿人群(rangifer tarandus caribou)的运动,以确定基于这种大型哺乳动物的功能连通性。我们创建了多个保护区网络方案,并评估了其生态反映性和对当前条件的功能连接性。我们选择了最有效的网络方案的子集,并提取了其中包括的保护区域。生态代表性与创建网络的功能连接之间的权衡。在最有效的网络中反复选择了可用的区域。最大化生态代表性和功能连通性的保护区代表了在有效保护区域网络中实施的合适区域。这些领域确保了该区域生物多样性的代表样本被网络涵盖,并最大程度地提高了保护区域之间和内部的随着时间的流动。
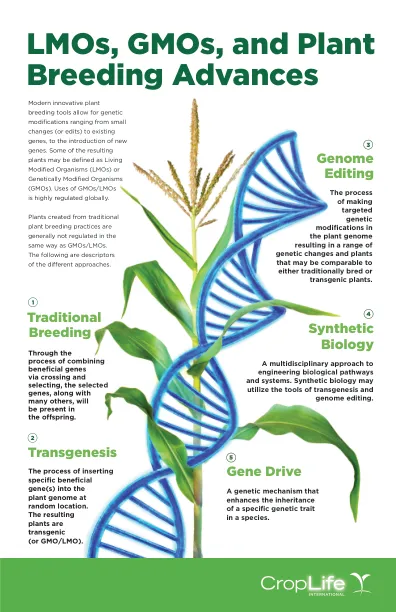
改性活生物体、转基因生物和植物育种进展
例如负责耐旱性的基因,并将其插入目标植物的基因组中,从而产生转基因生物(或 LMO)。使用物理方法或经过修饰的病毒或细菌来插入基因,限制了科学家对基因插入位置或基因是否成功表达(即产生的植物更耐旱)的控制。

使用 MATLAB GUI 进行移动物体检测和跟踪...
摘要:移动物体检测和跟踪是安全应用之一,由于其在视频监控、交通监控和图像识别等领域的应用,引起了计算机视觉研究人员的极大兴趣。移动物体检测涉及在连续帧中识别物体,而物体跟踪用于监控相对于感兴趣区域的移动。在这项研究工作中,GUI(图形用户界面)是使用 MATLAB 中的 Guide 创建的,它提供软件应用程序的点击控制,无需学习语言或输入命令即可运行应用程序。本文使用基于高斯混合模型的背景减法算法进行物体检测,该算法可以处理背景强度分布的较大变化,并使用卡尔曼滤波器进行视频跟踪,该滤波器使用随时间观察到的一系列测量值,包含统计噪声和其他不准确性,并产生未知变量的估计值,这些估计值往往比仅基于单个测量的估计值更精确,在物体周围绘制一个边界框以跟踪视频帧中移动的移动物体,每帧中物体的计数值显示在 MATLAB 命令窗口中。在这里,MATLAB 与 Arduino 板(基于微控制器的板)连接,该板与 LED 连接,根据计数值,LED 的数量将发光。MATLAB 的计数值通过串行通信与 Arduino 板通信。关键词:移动物体检测、跟踪、指南、MATLAB、LED、Arduino、串行通信。

高能双能计算机断层扫描,用于表征大而厚的物体
通常的计算机断层扫描(CT)系统提供有关组成对象的材料的布局和性质的信息。但是,此信息仅限于材料的明显线性衰减µ。要以有效的原子数z eff和电子密度ρe的形式达到更精确和准确的描述,可以使用双能量成像。常规的双能计算机计算机(DECT)技术是:(a)进行预处理的双能数据集并执行常规CT重建[1],(b)重建双能量数据集并分析获得的线性衰减数据集的比例,并在A上进行了一定的材料[2,3]和(C)[2,3],3]和(C) [4-6]。第二种技术相对方便地设置,但并非完全独立于能量。第三种技术已被证明相当有效;但是,它提出了一个用于分解的材料基础选择的问题。检查由大量不同材料组成的复杂物体时,此选择可能至关重要。因此,这项工作着重于将第一个技术扩展到高能,因为它不需要对材料进行任何假设,并通过系统频谱响应考虑了光束硬化效应。DEV源通常是X射线管,将诊断能范围限制在几百kV中。对于大而厚的物体,必须具有等效的X射线衰减,高达1 m的混凝土,高能(> 6 mV)的扫描仪是强制性的。[1]和Azevedo等。[7]需要扩展。在这样的能量下,E + E - 对生产优先于光电效果,而Alvarez等人启动了双能分解的工作。由于E + E - 对生产横截面𝜎 𝜎没有分析公式,该模型以第二阶多项式𝑔𝑔()的形式将贡献与原子数Z分开,并从能量E分开,并提出了第三阶多项式𝑔𝑃𝑃()和第三阶多项式1𝑓(and)。


使用简单检测通过量子态进行物体检测和测距
当目标物体嵌入在嘈杂的环境中时,使用弱光源感知目标物体的存在是一项艰巨的任务。一种可能性是使用量子照明来完成此任务,因为它在确定物体存在和范围方面的表现优于传统照明。即使传统照明和量子照明都限制在基于非同时、相位不敏感的巧合计数的相同次优物体检测测量中,这种优势仍然存在。受现实实验协议的启发,我们提出了一个使用简单探测器分析巧合多发数据的理论框架。这种方法允许包括经常被忽视的非巧合数据,并提供无需校准的阈值来推断物体的存在和范围,从而实现不同检测方案之间的公平比较。我们的结果量化了在嘈杂的热环境中进行目标识别时量子照明相对于传统照明的优势,包括估计以给定置信度检测目标所需的拍摄次数。