XiaoMi-AI文件搜索系统
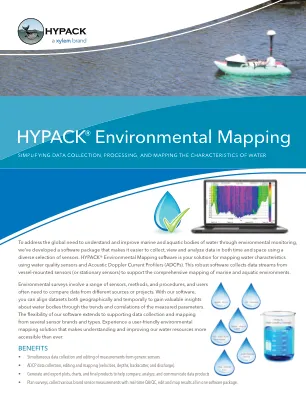
World File Search System环境映射

将IC发动机改造为两轮车中的EV
电子和电信工程部,AISSMS的理工学院,浦那,马哈拉施特拉邦,印度摘要:本文使用单个超声波传感器,Arduino板和带有驱动程序模块的5V步进电机的单个超声波传感器,Arduino板和5V步进电动机的设计和实现。该项目的目的是创建一个能够在整个360度范围内扫描环境的低成本,有效的类似系统。安装在步进电机上的超声波传感器允许在多个角度位置进行距离测量,从而提供周围区域的全面空间映射。Arduino董事会充当中央控制器,处理传感器数据采集,电机控制和实时数据处理。5V步进电动机与驱动器模块结合使用,可实现精确的旋转运动以进行准确的扫描,同时确保平稳可靠的操作。在各种应用程序中都证明了系统的功能,例如障碍物检测,环境映射和基本自主导航。本文还讨论了系统集成过程中遇到的挑战,包括实现准确的电机控制,传感器校准以及为实时数据可视化管理处理速度。结果表明,该雷达系统由负担得起的组件提供动力,是用于在机器人技术,监视和教育项目中应用的有效解决方案。