XiaoMi-AI文件搜索系统
World File Search System目标跟踪

在车辆摄像头传感器上使用EMI破坏活物体对象检测精度
摘要 - 计算机视觉是一项快速前进的技术,在很大程度上依赖相机传感器来为机器学习(ML)模型提供决策。已确认在各种未来派应用中发挥关键作用,例如自动驾驶汽车的进步,自动驾驶和目标跟踪无人机,停车援助和避免碰撞系统。但是,随着硬件级传感器黑客攻击的越来越多,即使是相机传感器也容易受到损害。本实验论文提出了使用电磁干扰(EMI)对机器计算机视觉(CV)进行机器学习能力的传感器黑客攻击的想法。开发了中端EMI入侵设备,以破坏计算机视觉系统的准确性和监督功能。评估研究了传感器黑客入侵对依赖实时饲料的障碍识别模型至关重要的摄像头传感器的影响,从而比较了有或没有传感器篡改的决策能力以评估整体效果。我们的结果表明,EMI显着影响相机传感器的性能,降低基于机器学习的对象检测系统的准确性和帧速率。这些发现强调了相机传感器对传感器黑客入侵的脆弱性,并突出了需要改进安全措施以保护计算机视觉系统中此类攻击的必要性。索引术语 - EMI,计算机视觉(CV),ML,自动驾驶车辆,避免碰撞

第 1 章:多传感器数据融合
近年来,军事和非军事应用领域的多传感器数据融合备受关注。数据融合技术将来自多个传感器的数据和相关信息结合起来,实现比使用单个独立传感器更具体的推断。多传感器数据融合的概念并不新鲜。随着人类和动物的进化,他们已经发展出使用多种感官帮助自己生存的能力。例如,仅使用视觉可能无法评估可食用物质的质量;视觉、触觉、嗅觉和味觉的结合更为有效。同样,当视觉受到建筑物和植被的限制时,听觉可以提前警告即将发生的危险。因此,动物和人类自然会进行多传感器数据融合,以更准确地评估周围环境并识别威胁,从而提高生存机会。虽然数据融合的概念并不新鲜,但新传感器、先进处理技术和改进的处理硬件的出现使得实时数据融合越来越可行。正如 20 世纪 70 年代早期符号处理计算机(例如 SYMBOLICs 计算机和 Lambda 机)的出现推动了人工智能的发展一样,计算和传感领域的最新进展也提供了在硬件和软件上模拟人类和动物的自然数据融合能力的能力。目前,数据融合系统广泛用于目标跟踪、目标自动识别和有限的自动推理应用。数据融合技术已从一组松散的相关技术迅速发展成为一门新兴的真正的工程技术
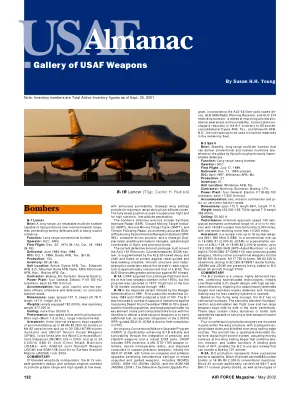
USAFAlmanac - 空军杂志
具有增强的生存能力。非后掠翼设置可在高空巡航期间提供最大航程。全后掠位置用于超音速飞行和高亚音速低空穿透。轰炸机的进攻性航空电子设备包括合成孔径雷达 (SAR)、地面移动目标指示器 (GMTI)、地面移动目标跟踪 (GMTT) 和地形跟踪雷达、极其精确的全球定位系统/惯性导航系统 (GPS/INS)、计算机驱动的航空电子设备和战略多普勒雷达,使机组人员能够导航、更新飞行中的目标坐标和精确轰炸。当前的防御性航空电子设备包以 ALQ-161 电子对抗 (ECM) 系统为基础,由 ALE-50 拖曳诱饵和箔条和照明弹补充,以防御雷达制导和热寻的导弹。飞机结构和雷达吸收材料将飞机的雷达信号降低到 B-52 的大约百分之一。ALE-50 可以更好地抵御射频威胁。B-1A。美国空军在 20 世纪 70 年代获得了这种新型战略轰炸机的四架原型飞行测试模型,但该项目于 1977 年取消。四架 B-1A 型号的飞行测试一直持续到 1981 年。B-1B 是里根政府于 1981 年发起的改进型。第一架生产模型于 1984 年 10 月首飞,美国空军共生产了 100 架。B-1 于 1984 年 12 月 1 日在沙漠之狐行动中首次用于支援对伊拉克的作战。
附录 VI - 词汇表和缩略词
ACA 绝对收缩法 AMS 自动测量系统 AQI 空气质量指数 AR 应用要求 ASHRAE 美国采暖、制冷与空调工程师协会 AWS 水资源管理联盟 BAT 最佳可用技术 BAT-AEL 最佳可用技术相关排放水平 BAT-AEPLs 最佳可用技术相关环境绩效水平 BBOP 商业与生物多样性抵消计划 BC 结论基础 BECCS 生物能源与碳捕获与封存 BREFs 最佳可用技术参考文献 Btu 英国热量单位 CapEx 资本支出 CBD 生物多样性公约 CCS 碳捕获与封存 CDDA 指定区域通用数据库 CDP 碳披露项目 CDSB 气候披露标准委员会 CH4 甲烷 CICES 生态系统服务通用国际分类 C MIP5 耦合模型比对项目第 5 阶段 CO2 二氧化碳 CRR 资本要求条例 CSRD 企业可持续性报告指令 DC-A 披露内容 - 与可持续发展相关的行动和资源重大可持续性事项 DC-M 披露内容 - 与重大可持续性事项相关的指标 DC-P 披露内容 - 为管理重大可持续性事项而采取的政策 DC-T 披露内容 - 目标 - 通过目标跟踪政策和行动的有效性 DEGURBA 城市化程度 披露要求 BP-1 披露要求 - 编制可持续性声明的一般基础 披露要求 BP-2 披露要求 - 与具体情况相关的披露
DGCA-MID/7 – IP/7
本文提供了有关2023年发表的IATA NET零跟踪方法(该方法)状态的信息,并建议将其数据收集的指标和过程用于DGCA-MID的工作。DGCA-MID在第4.1段中采取的行动请注意IATA和行业在2050年建立IATA净零碳目标跟踪方法方面所取得的进展。1。i ntroduction 1.1组装决议A41-22要求理事会不断监视长期志向目标(LTAG)的所有措施的实施。1.2 IATA认识到能够跟踪,衡量和报告实现ICAO LTAG的措施的进展的重要性,并向国际民航组织及其成员国提供支持。因此,本文详细介绍了IATA净零跟踪方法的状态和随后的跟踪计划,并有可能为将来的讨论提供基础。2。s tatus of IATA M病理学2.1背景2.1.1在2021年10月4日的第77届IATA年度股东大会上,IATA成员航空通过了一项决议,下令他们从2050年到2050年从其运营中实现净零碳发射。创建了该方法的目的是为了证实这一2050年目标的进步,并打算根据直接从航空公司收集的主要运营数据来跟踪历史排放。可以根据方法与IATA净零路线图进行比较,以告知进度。IATA净零路线图正在临时更新。2.1.2该方法定义了排放范围,确定数据源,并标准化了所报告的指标,以实现透明度,可比性,允许易于聚合,并减少航空公司的管理负担。

智能系统中的多传感器集成与融合
摘要-人们对使用多个传感器来提高智能系统能力的兴趣日益浓厚。将多个传感器集成到系统运行中所涉及的问题是在这些传感器能够提供的独特信息类型的背景下提出的。通过协同使用多传感器信息所获得的优势可以分解为四个基本方面的组合:信息的冗余性、互补性、及时性和成本。多个传感器在特定系统运行中的作用可以定义为这四个方面在传感器提供的信息中的存在程度。多传感器集成与更严格的多传感器融合概念之间存在区别,以将在系统架构和控制级别集成多个传感器设备所涉及的更一般的问题与实际组合(或融合)多传感器信息所涉及的更具体的问题(可能是数学或统计问题)区分开来。本文概述了近年来文献中出现的越来越多的多传感器集成与融合问题方法,包括集成与融合多传感器信息的一般范例、框架和方法,以及用于不同应用领域的现有多传感器系统。本文概述了一般的多传感器融合方法、传感器选择策略和世界模型,以及集成与融合来自不同类型传感器组合的信息的方法。本文简要描述了多传感器集成与融合在许多现有移动机器人操作中的作用,并提出了适用于移动机器人导航和控制的高级多传感器表示。本文概述了现有多传感器系统在以下应用领域的应用:工业任务,如材料处理、零件制造(例如焊接)、检查和组装;军事指挥与控制,用于战斗管理;空间;目标跟踪;惯性导航;以及沿海水域的遥感。讨论包括创建多传感器集成和融合的通用方法可能出现的问题,重点关注用于建模集成和融合过程中的误差或不确定性的方法(例如,配准问题)、实际传感信息(即传感器模型)以及整个系统的操作(例如,多传感器校准)。

用于行星探索的无人机:建模挑战
在过去十年中,太空探索的力度大大增加,因此需要新的方法来研究行星和其他天体。现代趋势是制造能够从更高角度侦察表面的航天器,而无人机已被证明是最有用的。一般来说,无人机以其灵活性、速度、悬停能力、避障、目标跟踪和跟随而闻名。认为任何类型的无人机都适合太空应用都是合理的,因为它们都具有可以满足任务要求的优势。太空领域的设计选择深受一些限制的影响,例如最大尺寸、总重量、成本、环境、温度。此外,还需要考虑使平台能够执行任务的基本要求,这些要求通常由各种子系统来确保:热、通信、机载数据处理、电力、推进以及制导、导航和控制。太空探索的主要焦点是火星和旋翼机概念:事实上,Ingenuity 直升机就是一个很好的例子,如图 1 所示,它于 2021 年在红色星球上进行了首次飞行。火星大气与地球不同,这带来了特殊的空气动力学挑战。第一个很大的变化是低大气密度,再加上无人机尺寸有限,导致弦基雷诺数流动非常低(103-104)[1]。这些流动更多的是以粘性力而非惯性力为特征,导致机翼性能效率下降。这会影响升力,但较低的重力加速度(3.71 m/s2)略微补偿了升力。自 20 世纪 30 年代以来,人们在该领域进行了各种研究,并且可以确定三个描述流动行为的区域:亚临界( Re < 10 5 )、临界( Re ∼ 10 5 )和超临界( Re > 10 5 )。对于火星研究,重点放在亚临界区域,其中层流边界层倾向于分离,导致阻力系数较大,升力系数降低。这种层流分离流的不稳定性导致向湍流的转变,这会引起重新附着,从而产生层流分离气泡,影响翼部的性能。可以采用各种方法来进行气动分析:例如,将流动视为完全层流 [2] 或使用 RANS、LES
智能系统中的多传感器集成与融合
摘要-人们对使用多个传感器来提高智能系统能力的兴趣日益浓厚。将多个传感器集成到系统运行中所涉及的问题是在这些传感器能够提供的独特信息类型的背景下提出的。通过协同使用多传感器信息所获得的优势可以分解为四个基本方面的组合:信息的冗余性、互补性、及时性和成本。多个传感器在特定系统运行中的作用可以定义为这四个方面在传感器提供的信息中的存在程度。多传感器集成与更严格的多传感器融合概念之间存在区别,以将在系统架构和控制级别集成多个传感器设备所涉及的更一般的问题与实际组合(或融合)多传感器信息所涉及的更具体的问题(可能是数学或统计问题)区分开来。本文概述了近年来文献中出现的越来越多的多传感器集成与融合问题方法,包括集成与融合多传感器信息的一般范例、框架和方法,以及用于不同应用领域的现有多传感器系统。本文概述了一般的多传感器融合方法、传感器选择策略和世界模型,以及集成与融合来自不同类型传感器组合的信息的方法。本文简要描述了多传感器集成与融合在许多现有移动机器人操作中的作用,并提出了适用于移动机器人导航和控制的高级多传感器表示。本文概述了现有多传感器系统在以下应用领域的应用:工业任务,如材料处理、零件制造(例如焊接)、检查和组装;军事指挥与控制,用于战斗管理;空间;目标跟踪;惯性导航;以及沿海水域的遥感。讨论包括创建多传感器集成和融合的通用方法可能出现的问题,重点关注用于建模集成和融合过程中的误差或不确定性的方法(例如,配准问题)、实际传感信息(即传感器模型)以及整个系统的操作(例如,多传感器校准)。
智能系统中的多传感器集成与融合
摘要-人们对使用多个传感器来提高智能系统能力的兴趣日益浓厚。将多个传感器集成到系统运行中所涉及的问题是在这些传感器能够提供的独特信息类型的背景下提出的。通过协同使用多传感器信息所获得的优势可以分解为四个基本方面的组合:信息的冗余性、互补性、及时性和成本。多个传感器在特定系统运行中的作用可以定义为这四个方面在传感器提供的信息中的存在程度。多传感器集成与更严格的多传感器融合概念之间存在区别,以将在系统架构和控制级别集成多个传感器设备所涉及的更一般的问题与实际组合(或融合)多传感器信息所涉及的更具体的问题(可能是数学或统计问题)区分开来。本文概述了近年来文献中出现的越来越多的多传感器集成与融合问题方法,包括集成与融合多传感器信息的一般范例、框架和方法,以及用于不同应用领域的现有多传感器系统。本文概述了一般的多传感器融合方法、传感器选择策略和世界模型,以及集成与融合来自不同类型传感器组合的信息的方法。本文简要描述了多传感器集成与融合在许多现有移动机器人操作中的作用,并提出了适用于移动机器人导航和控制的高级多传感器表示。本文概述了现有多传感器系统在以下应用领域的应用:工业任务,如材料处理、零件制造(例如焊接)、检查和组装;军事指挥与控制,用于战斗管理;空间;目标跟踪;惯性导航;以及沿海水域的遥感。讨论包括创建多传感器集成和融合的通用方法可能出现的问题,重点关注用于建模集成和融合过程中的误差或不确定性的方法(例如,配准问题)、实际传感信息(即传感器模型)以及整个系统的操作(例如,多传感器校准)。
智能系统中的多传感器集成与融合
摘要-人们对使用多个传感器来提高智能系统能力的兴趣日益浓厚。将多个传感器集成到系统运行中所涉及的问题是在这些传感器能够提供的独特信息类型的背景下提出的。通过协同使用多传感器信息所获得的优势可以分解为四个基本方面的组合:信息的冗余性、互补性、及时性和成本。多个传感器在特定系统运行中的作用可以定义为这四个方面在传感器提供的信息中的存在程度。多传感器集成与更严格的多传感器融合概念之间存在区别,以将在系统架构和控制级别集成多个传感器设备所涉及的更一般的问题与实际组合(或融合)多传感器信息所涉及的更具体的问题(可能是数学或统计问题)区分开来。本文概述了近年来文献中出现的越来越多的多传感器集成与融合问题方法,包括集成与融合多传感器信息的一般范例、框架和方法,以及用于不同应用领域的现有多传感器系统。本文概述了一般的多传感器融合方法、传感器选择策略和世界模型,以及集成与融合来自不同类型传感器组合的信息的方法。本文简要描述了多传感器集成与融合在许多现有移动机器人操作中的作用,并提出了适用于移动机器人导航和控制的高级多传感器表示。本文概述了现有多传感器系统在以下应用领域的应用:工业任务,如材料处理、零件制造(例如焊接)、检查和组装;军事指挥与控制,用于战斗管理;空间;目标跟踪;惯性导航;以及沿海水域的遥感。讨论包括创建多传感器集成和融合的通用方法可能出现的问题,重点关注用于建模集成和融合过程中的误差或不确定性的方法(例如,配准问题)、实际传感信息(即传感器模型)以及整个系统的操作(例如,多传感器校准)。