XiaoMi-AI文件搜索系统
World File Search System着陆的
新闻公告2023年8月
当地中心主席和名誉秘书。他们必须利用自己的智慧和经验来认识和培养团队内的独特才能和优势,并以坚定的信念和承诺,无论他们在哪里都可以提升并将IEI中心带到更高的高度,以提高工程师(印度)形象。8月23日,印度加入了一个精英俱乐部,该俱乐部只有其他三个国家,这些国家在月球表面上有一个流浪者。这样,它也成为唯一一个在月球南极附近实现柔和着陆的国家,这是一个很大程度上未知的地区。“印度在月球上”是Chandrayaan-3在月球上的成功且安全的登陆。每个印度人都是一个享有声望和骄傲的历史时刻。我对所有科学家和工程师的团队以及所有其他ISRO团队都表示祝贺。er。S. Kannan,Fie主席S. Kannan,Fie主席
课程
Ae 105 abc。空间工程。第一学期 9 个学分 (3-0-6),第二学期 (2-4-3),第三学期 (0-8-1);第一、第二、第三学期。先决条件:ME 11 abc 和 ME 12 abc 或同等学历。第一部分:基于天体动力学的空间任务设计。主题包括具有扰动(J2、阻力和太阳辐射压力)的圆锥轨道、朗伯定理、周期轨道和地面轨迹、不变流形和变分方程,以及行星飞越、星座、编队飞行和低能行星捕获和着陆的任务应用。第二部分:航天器系统和子系统、任务设计、火箭力学、运载火箭和空间环境简介;航天器机械、结构和热设计;通信和电力系统;团队项目的初步讨论和设置,以进行系统需求审查。第三部分:团队项目,以进行初步设计审查和关键设计审查。教练:Campagnola、Watkins、Pellegrino。

使用卷积神经网络的火山口检测强大的照明和塑造变化*
作为有关月球和火星的大量数据,勘探任务正在转移到下一步,其目的是确定目标的精确着陆。精确着陆的有前途的技术是地形相对导航(TRN),该技术从地标图像和地图中检测到了地标。火山口检测是TRN的重要技术之一。检测陨石坑的一个问题是由于不融合条件而导致的陨石坑的明显变化。另一个问题是由于火山口降解而导致的形状变化。我们提出了一种基于组合支持向量机(SVM)和卷积神经网络(CNN)的新型火山口检测方法,以使检测性能稳健,以防止明显变化。在线性SVM中,学习了火山口图像数据集的梯度图像。然后使用学习的分类器来计算区域建议的物体得分。接下来,CNN识别提出区域的图像是否是火山口。我们的结果表明,所提出的方法可以在各种照明和形状条件下检测陨石坑,并且比传统的陨石坑具有更好的平均精度。

TAC 攻击 1964 年 11 月团队努力 -空战司令部
当老北风先生从冰冷的北极的家中呼啸而出时,他带来了两个麻烦的朋友,阴沉的天空和滑溜的跑道。在古老的飞行牧场周围,很难说谁会带来最大的痛苦。阴沉的天空会突然带来泪水、雨夹雪和大雪,使寻找古老的飞行牧场变得非常困难,而老滑溜的天空会让在找到牧场后停留更加困难。这是龙的季节。•• 如果一个着陆的鸟人回头看到一条好降落伞龙在他的铁鸟后面,他通常可以停止出汗。如果他回头看到一条坏降落伞龙,或者根本没有龙,他会像七月的高炉司炉工一样出汗。如果他及时得到一条钩龙,他可能能够借助一条小链龙或胶带龙的帮助来防止他的鸟弯曲。但是,在正常操作中,它们都无法取代好降落伞龙。

2025 HERC手册
HP竞争课程需要两名学生,至少一名女性,才能使用学生设计的车辆穿越大约半英里的路线,其中包括模拟的小行星碎屑,巨石,巨石,侵蚀车辙,缝隙,缝隙和古老的流媒体。挑战的体重和大小要求鼓励流动站的紧凑性和繁殖效率。就像在阿波罗14号地面任务中一样,团队必须对尝试哪种任务目标和落后的任务目标做出实时决定 - 所有这些都由有限的,虚拟的八分钟氧气供应。就像在阿波罗15号任务中一样,竞争团队必须准备在两次巡回车辆上进行两次短途旅行。RC团队将发现障碍赛的过程要容易得多,但是需要尝试两项任务任务来帮助确定未来NASA人类登陆系统(HLS)船员着陆的合适地点。
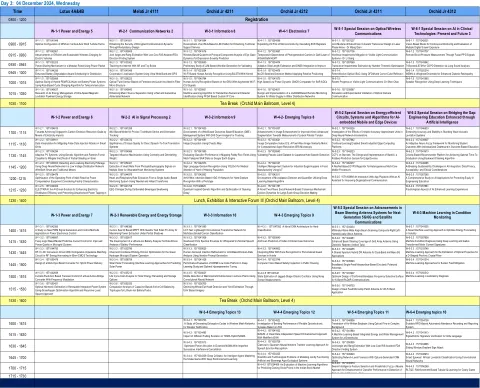
第3天:20024年12月4日,星期三
数字双胞胎方法,用于在复杂地形W-P.20 1571034363上安全着陆的数字型登陆:teahertz真空电子销售W-21 1571033985的铅笔梁电子光学系统:开发3kWhe电池储能系统的3KWH WATTEM WYMBACACITOR HYBRID储能WIREDENS WIRSTID WIRESTER WIRESTER WONSTINE W-P.22 157105624:便携式太阳能充电设备W-23 1571037449:分层型号堆叠:通过先进的合奏机器学习技术W-24 1571044011:使用智能人工照明系统W-P.25 1571056759:Mobile Rob 2 Feagle Black Interage Mobile Robots WW-P.24 1571044011通过高级合奏机器学习技术W-24 1571044011:Solar Greenhouse INLUMINANIT 1571049612:使用深度学习模型W-P.27 W-P.28 1571042716:FMCW雷达成像的优势和挑战,通过变化的子频段W-P.29 1571043662:探索人类活动的潜在,探索w-p.30 15710506050605060600600000100060000090060060000900000001T,天气信息聚合(SIGWA)W-31 1571033978:基于逆变器的电源系统W-32 1571050826:PointBi-fpn:对LIDAR 3D对象的PointPillars ticlection fluipection fter-divection

SpaceX Falcon9使用机器学习登陆预测
该项目工作的目的是使用数据科学和机器学习算法预测SpaceX Falcon 9火箭着陆系统的成功或失败。此项目所需的数据是从SpaceX API收集的。以下工具和技术用于数据预处理和分析:用于数据操作和分析的PANDA和NUMPY,用于探索性数据分析的数据可视化以及用于预测的机器学习算法。该项目涉及以下步骤:从SpaceX API中收集数据,使用Pandas和Numpy进行预处理数据,并使用数据可视化技术,功能工程来提取预测模型的相关功能,构建机器学习模型,以预测Falcon 9 Rocket登陆的成功或使用适当的模型的表现,并使用适当的Metrics进行了预测。该项目使用机器学习算法来预测Falcon 9火箭着陆的成功或故障。该模型对历史数据进行了培训,并对新数据进行了测试以评估其性能。该项目旨在洞悉导致Falcon 9火箭登陆的成功或失败的因素。

飞机降落在航母上的模糊路径选择策略
摘要:着陆是航空母舰上所有作业中最危险的任务之一,着陆安全对飞行员和甲板操作都至关重要。目前,舰载机着陆的安全性通过设计自动着陆控制器和训练飞行员提高其控制能力来提高,但迄今为止尚未研究选择着陆路径的重要性。本文研究了航空母舰着陆路径选择问题,因为存在多个对应于不同情况的候选路径。考虑到环境信息和人为判断的模糊性,提出了一种模糊路径选择策略来解决该问题,目标是为飞行员提供更合理的决策。该策略考虑到了工业界广泛使用的模糊多属性群决策 (FMAGDM) 的思想。首先,给出着陆路径选择的背景。然后,抽象出影响决策的因素并建立概念模型。开发了基于TOPSIS的群决策方法来表示每个决策者对每条备选路线的偏好,并考虑到飞行员和着陆控制台操作员(LCO)的知识和权重来确定当前环境下的最佳着陆路径。在不同设置(即不同环境下)下进行实验研究

控制系统、模糊逻辑和电传操纵系统...
15.补充说明 这项工作是在任务 AM-A-00-HRR-519 下进行的。16.摘要:在 FAA 民用航空医学研究所的可重构通用航空模拟器(配置为 Piper Malibu)中评估了一种模糊逻辑“性能控制”系统,该系统提供包络保护和对空速、垂直速度和转弯速率的直接控制。在一项飞行任务中评估了 24 个人(高飞行时间飞行员、低飞行时间飞行员、学生飞行员和非飞行员各 6 人)的表现,该任务要求参与者跟踪从起飞到着陆的 3-D 航线,由图形路径主飞行显示器表示。还使用传统控制系统收集了每个受试者的基线表现。所有参与者都操作每个系统,对其功能进行了最少的解释,并且没有接受过任何培训。结果表明,模糊逻辑性能控制减少了变量误差和超调,新手学习所需的时间更少(从达到稳定性能所需的时间可以看出),使用起来所需的努力更少(减少了控制输入活动),并且受到所有群体的青睐。

通过大规模飞行数据分析评估机场着陆效率
摘要 轨迹优化是航空运输和空中交通管理的一个主要研究课题,因为它对乘客、航空公司和整个环境都有深远的影响,从而对航空运输的感知价值和成本也有深远的影响。虽然人们很好地理解了优化飞行途中部分的挑战,但对最后一部分,即进近和着陆的关注相对较少。在这里,我们展示了如何使用开放的大规模飞机轨迹数据集来表征飞机降落在机场的效率,通过在 10,000 英尺以下飞行的时间和距离来测量。产生的图像高度异质,在低空停留的时间从苏黎世的平均 10 分钟到伦敦希思罗机场的 16 分钟不等。抵达同一机场的航班也会经历截然不同的时间,例如伦敦希思罗机场的到达时间从 12 分钟到 20 分钟不等,具体取决于交通量、一年中的时间和一天中的时间,以及与其他交通模式和机场的互动等因素。从更一般的角度来看,本文说明了如何利用大型数据集的可用性来提高我们对系统实际行为的理解,尤其是其与计划的偏差。