XiaoMi-AI文件搜索系统
World File Search System碰撞检测

AT&T Fleet完整视觉小册子(EN-NA)AT&T Fleet完整视觉小册子(EN-NA)
有助于防止与可见的车载警报和高级驾驶员辅助系统发生碰撞或交通违规。启用实时驾驶员教练和访问数据驱动的车队和驾驶员安全报告,以主动监视进度。碰撞检测立即通知车队管理员,以便他们可以检查驾驶员和车辆。正向碰撞警告通过检测到停止或慢慢移动车辆来提醒驾驶员即将发生碰撞。

LMS Virtual.Lab Motion - 创新多体仿真
在构建和测试昂贵的物理原型之前开发优化的机械系统需要准确的动态运动结果。当今 CAD 软件包中的运动模块无法满足这些需求,因为它们仅限于运动范围预测和碰撞检测。相反,LMS Virtual.Lab Motion 通过包括质量、惯性、刚度、摩擦等来模拟动态系统行为,因此能够在整个产品开发过程中提供更有价值的工程见解。快速迭代模拟可以准确预测动态运动和内部负载,使工程师能够评估多种设计方案的实际性能。
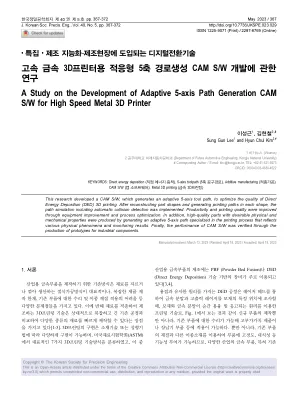
高速度金属3D打印机适应5轴路由凸轮...
这项研究开发了一个CAM S/W,生成自适应5轴工具路径,以优化直接能量沉积(DED)3D打印的质量。重建零件形状并以每种形状生成打印路径后,实现了包括自动碰撞检测的路径模拟。通过改进和过程优化提高了生产率和印刷质量。此外,通过产生专门针对印刷过程的自适应5轴路径来产生具有理想物理和机械性能的高质量零件,以反映各种物理现象和监测结果。最后,通过生产工业组件的原型来验证CAM S/W的性能。

yihao liu div>
- 机器人[link]和AR [link]辅助医疗程序| C ++,Python,C#,Matlab,Ros,Unity,VTK O完成了机器人TMS的原型,并将其用于初步的内部临床试验和神经科学研究。o开发了用于TMS目标计划和医疗图像查看的神经运动系统。 o开发了具有用于KUKA LBR7 IIWA控制[repo]的功能模块的集成[请求演示]硬件[repo],手眼校准[2,8],工具校准[2],动力学建模[7],用户界面,用户界面和网络[repo,repo,repo]。 o开发的AR系统[2,9]提供了碰撞检测线索,并能够进行人体工程学的计划和执行。 o撰写了学术出版物[2,5,7-9,13,14]和专利申请,并在会议上介绍。 o将这些技术和系统应用于其他侵入性程序,例如股骨成形术,脊柱融合和颅面手术。o开发了用于TMS目标计划和医疗图像查看的神经运动系统。o开发了具有用于KUKA LBR7 IIWA控制[repo]的功能模块的集成[请求演示]硬件[repo],手眼校准[2,8],工具校准[2],动力学建模[7],用户界面,用户界面和网络[repo,repo,repo]。o开发的AR系统[2,9]提供了碰撞检测线索,并能够进行人体工程学的计划和执行。o撰写了学术出版物[2,5,7-9,13,14]和专利申请,并在会议上介绍。o将这些技术和系统应用于其他侵入性程序,例如股骨成形术,脊柱融合和颅面手术。

回顾最先进的 6D 姿态估计及其在太空作战中的应用
现在,自主系统的增加要求这些系统能够在其环境中与其他物体近距离工作,并且需要在环境物体上完成许多任务,例如装配、运输、会合、对接或避开它们,如碰撞检测/避免、路径规划等。在这篇文献综述中,我们讨论了基于机器学习的算法,这些算法解决了基于视觉的自主系统的第一步,即基于视觉的姿势估计。本文对使用 2D 和 3D 输入数据的 6D 姿势估计的进展进行了批判性回顾,并比较了它们如何应对基于计算机视觉的定位问题所面临的挑战。我们还研究了算法及其在太空任务中的应用,如在轨对接、会合和空间视觉应用带来的挑战。在综述的最后,我们还强调了一些小问题和未来研究的可能途径。

触觉简介
触觉是指触摸和相关感觉反馈的形式。该领域的研究人员致力于开发、测试和改进触觉和力反馈设备及支持软件,使用户能够感知(“感觉”)和操纵三维虚拟物体的形状、重量、表面纹理和温度等特征。除了对人类触觉的基本心理物理研究以及机器触觉问题(如碰撞检测、力反馈和触觉数据压缩)之外,研究人员还在应用领域开展研究,如手术模拟、医疗培训、科学可视化以及盲人和视障人士的辅助技术。设备如何模拟触觉?我们来考虑一下 SensAble Technologies 的一种设备。3 DOF(自由度)PHANToM 是一个小型机械臂,带有三个旋转关节,每个关节都连接到计算机控制的直流电动机。该设备的尖端连接到用户握住的触控笔上。通过发送适当的电压 -
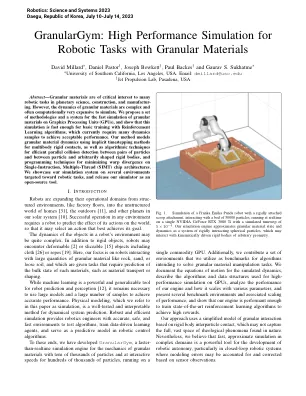
粒度:使用粒状材料进行机器人任务的高性能模拟
摘要 - 植物材料对行星科学,建筑和制造业中许多机器人任务的关键兴趣。但是,颗粒材料的动力学很复杂,并且通常在计算上非常昂贵。我们提出了一组方法和一个用于快速模拟图形处理单元(GPU)的颗粒材料的系统,并表明该模拟足够快,可以通过增强学习算法进行基础培训,目前需要许多动力学样本才能实现可接受的性能。我们的方法模型使用隐式时间播放方法进行多体刚性接触的颗粒材料动力学,以及算法技术,用于在粒子对和任意形成的刚体之间和任意形状的刚体之间的有效并行碰撞检测,以及用于最小化Warp Divergence的编程技术,以最大程度地构建单层构造(构建多项)。我们在针对机器人任务的几个环境上展示了我们的仿真系统,并将模拟器作为开源工具发布。

Billy Buddy针对网络欺凌
摘要 - 该项目介绍了与机器学习能力集成的基于嵌入式智能事故预防和预防系统的设计和实施。该系统旨在用于监视各种参数,包括驾驶员的透眼,心率,酒精含量,事故检测车辆定位以及环境因素,以提高道路安全并预防事故。该系统结合了与多个传感器连接的Raspberry Pi控制器,包括USB摄像头,心率传感器,酒精传感器,MEMS传感器,GPS模块,超声波传感器和GSM模块。Raspberry Pi从这些传感器中处理数据,以监视驾驶员的状况,车辆状态和周围环境。摄像机不断检测到驾驶员的眼睛,提供了对其机敏和嗜睡水平的见解。心率传感器监视驾驶员的心率,提供其他压力或疲劳的指标。酒精传感器测量驾驶员呼吸中的酒精含量,提醒驾驶员是否受到影响。发生潜在的事故,MEMS传感器会检测到车辆加速度或方向的突然变化,表明碰撞。同时,超声波传感器检测附近车辆的接近度,从而增强了碰撞检测。

连接车辆的网络安全
诸如远程启动车辆,监视轮胎压力,门锁和解锁以及借助遥控器的气候控制之类的功能已经存在了几年。今天,基于地理信息系统(GIS)的功能,与道路交通系统的连通性以及指数乘以智能手表,汽车和移动设备之间的接口,基于云基于云的应用程序支持系统 - 由于技术和其他进步而逐渐成长。此外,一些新功能,例如实时交通流量,可以帮助您避免人群,而某些应用程序则帮助您更新您的到达时间的联系人。GIS可启用街道级别的景观,可帮助您在开车时识别周围环境,而与其他应用程序集成为您提供更新的停车位,从而节省了停车或支付溢价的侦察的麻烦。电动汽车(EVS)拥有集成的服务,可帮助您在最近的电动汽车充电站充电汽车,同时最大程度地减少充电时间。车辆远程信息处理进一步能够引入许多新服务,例如碰撞检测,道路安全,驾驶员行为的识别和车辆跟踪。这些反过来又发现了新的用例,包括车队所有者和个人驾驶员,从而增强了所有人的汽车所有权和使用体验。