XiaoMi-AI文件搜索系统
World File Search System移动站

ETSI TR 102 300-6 V1.1.2 (2016-05)
AGA 空-地-空 AGA_MS 空-地-空移动站 AGL 地面以上 ATG 空对地(也称为 A2G) BS 基站 DC 直流 DMO 直接模式操作 ECC 电子通信委员会 EIRP 等效全向辐射功率 EMC 电磁兼容性 HF 高频 HPSC 高度优选用户类别 LA 位置区 MCCH 主控制信道 MMI 人机接口 MS 移动站 PD 分组数据 PLA 优选位置区 PSC 优选用户类别 PSS 公共安全频谱 PTT 按下通话开关,也称为 pressel RF 射频 RSSI 无线电信号强度指示 RX 接收 SC 用户类别 SwMI 交换和管理基础设施 SWR 驻波比 TMO 集群模式操作 TX 发送 TX/RX 发送/接收 V+D 语音加数据(集群基础设施) VHF 甚高频
ETSI TR 102 300-6 V1.1.2 (2016-05)
AGA 空-地-空 AGA_MS 空-地-空移动站 AGL 高于地面 ATG 空对地(也称为 A2G) BS 基站 DC 直流 DMO 直接模式操作 ECC 电子通信委员会 EIRP 等效全向辐射功率 EMC 电磁兼容性 HF 高频 HPSC 高度优选用户类别 LA 位置区 MCCH 主控制信道 MMI 人机接口 MS 移动站 PD 分组数据 PLA 优选位置区 PSC 优选用户类别 PSS 公共安全频谱 PTT 按下通话开关,也称为 pressel RF 射频 RSSI 无线电信号强度指示 RX 接收 SC 用户类别 SwMI 交换和管理基础设施 SWR 驻波比 TMO 集群模式操作 TX 发送 TX/RX 发送/接收 V+D 语音加数据(集群基础设施) VHF 甚高频
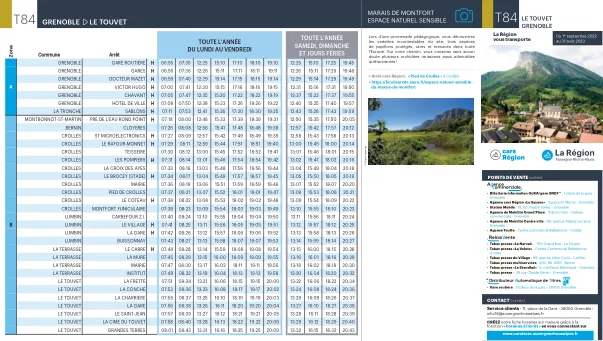
T84 格勒诺布尔 TouveT
• 售票处信息OùRA! SNCF 火车站 * - 1 place de la gare - 格勒诺布尔 • 地区长途汽车代理“Le Square” - Square Dr Martin - 格勒诺布尔 • 移动站 - 15, bd Joseph Vallier - 格勒诺布尔 • Grand'Place 移动代理 - 电车站 - 购物中心 - 格勒诺布尔 • 市中心移动代理 - 49, avenue Alsace Lorraine - 格勒诺布尔 • TouGo 代理 - Belledonne 购物中心 - 克罗尔

无线通信中的定位技术...
二维空间 三维空间 第四代操作系统 到达角 辅助全球定位系统 机载预警和空中指挥系统 加性高斯白噪声 基站 基于集群的路由协议 Cramer-Rao 下界 国防部增强型-119 联邦通信委员会 精度几何稀释 全球定位系统 组重复间隔 分层状态路由 初始作战能力 K-最近邻 局域网 基于位置的服务 视距 远程导航 位置服务中心 移动站 非视距 位置、计时、导航 相对距离 微发现 自组织路由 无线电地图 接收信号强度 接收信号强度指示器 到达时间差 到达时间 飞行时间 世界时协调 超宽带 Wi-Fi 定位系统
石英晶体谐振器和振荡器
从历史上看,随着商用双向无线电用户数量的增长,信道间隔不断缩小,必须分配更高频率的频谱来满足需求。更窄的信道间隔和更高的工作频率需要更严格的频率公差,无论是发射器还是接收器。1940 年,当只有几千台商用广播发射机在使用时,500 ppm 的公差就足够了。今天,数百万部蜂窝电话(工作在 800 MHz 以上的频段)中的振荡器必须保持 2.5 ppm 或更高的频率公差。896-901 MHz 和 935-940 MHz 移动无线电频段要求基站的频率公差为 0.1 ppm,移动站的频率公差为 1.5 ppm。容纳更多用户的需求将继续要求越来越高的频率精度。例如,NASA 的个人卫星通信系统概念将使用类似对讲机的手持终端、30 GHz 上行链路、20 GHz 下行链路和 10 kHz 信道间隔。终端的频率精度要求是 10 8 的几分之一。
石英晶体谐振器和振荡器
从历史上看,随着商用双向无线电用户数量的增长,信道间隔不断缩小,必须分配更高频率的频谱才能满足需求。更窄的信道间隔和更高的工作频率需要更严格的频率公差,无论是发射器还是接收器。1940 年,当只有几千台商用广播发射机在使用时,500 ppm 的公差就足够了。今天,数百万部蜂窝电话(工作在 800 MHz 以上的频段)中的振荡器必须保持 2.5 ppm 或更高的频率公差。896-901 MHz 和 935-940 MHz 移动无线电频段要求基站的频率公差为 0.1 ppm,移动站的频率公差为 1.5 ppm。容纳更多用户的需求将继续要求越来越高的频率精度。例如,NASA 的个人卫星通信系统概念将使用类似对讲机的手持终端、30 GHz 上行链路、20 GHz 下行链路和 10 kHz 信道间隔。终端的频率精度要求是 10 8 的几分之一。
![arXiv:2210.11373v2 [eess.SP] 2022 年 10 月 24 日](/simg/8\816abd8208fcdfc1a97e85f4cf500e49710f7c27.webp)
arXiv:2210.11373v2 [eess.SP] 2022 年 10 月 24 日
智能反射面 (IRS) 是一种数控超表面,包含大量无源反射元件。通过重新配置每个元件的反射系数,IRS 可以控制无线信道,以提高通信系统的覆盖范围和容量 [1–3]。然而,要通过 IRS 增强信道特性,获取准确的信道状态信息是不可避免的。因此,在本文中,我们通过利用固有信道结构来解决 IRS 辅助多输入多输出 (MIMO) 系统的上行信道估计问题。相关工作:早期关于 IRS 辅助通信系统的信道估计工作主要集中于非结构化信道模型 [4],采用最小二乘或线性最小均方误差估计器 [5]。然而,在较高频段(例如毫米波或太赫兹频段),移动站 (MS)-IRS 和 IRS-基站 (BS) 信道在角域中都表现出很强的稀疏性 [5]。这一观察结果促使 IRS 辅助信道估计算法探索信道的固有稀疏性,从而减少导频开销 [5]。最近的估计器通过考虑额外的

radalyx - 机器人X射线扫描仪
摘要在本文中,我们提出了一种可移植的多机器人成像平台的应用,称为Radalyx,具有CT(计算机断层扫描)检查功能。radalyx配备了6关节机器人臂,可容纳特定成像模块。对于X-Ray成像,Radalyx的标准配置包括两个机器人。一个机器人固定X射线管,另一个机器人持有检测器。机器人上的集成成像工具允许将检测器和X射线管定位在被扫描的对象周围。根据样本量和形状,机器人执行预编程的运动,捕获随后将其处理为2D或3D图像的X射线投影。定位灵活性可以以多个角度(“任意路径CT”)具有新的扫描轨迹。radalyx具有精确校准且可重复的几何精度,进行CT和横向合成扫描以及常规的2D射线照相扫描,从而导致空间分辨率高达60 µm。机器通过使用光子计数检测器克服了常规CT系统的局限性,该检测器在分辨率,灵敏度,动态范围,降低降噪和光谱成像方面具有益处。radalyx允许将多个扫描机器人集成到几个独立和可移动站。电台可以任意定位在田地中,并通过几何校准以启用扫描模式,例如X射线传输甚至单面方法,例如X射线后散射。此外,radalyx可通过其他成像方式(例如激光分析和激光激光超声波)扩展,从而提供了各种材料的互补检查功能。radalyx正在改善成像方法的适用性,以在检查对象和检验不可行或仅受到限制的更广泛的测试对象和字段中。