XiaoMi-AI文件搜索系统
World File Search System移动
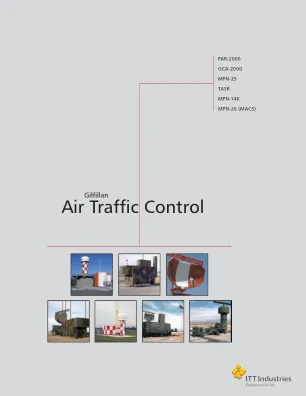
空中交通管制 - 移动军用雷达
• 固态砷化镓发射/接收模块 • 模块化、开放式系统架构 • 在恶劣天气条件等恶劣环境下也能准确运行 • 独特的 3 级天气显示 • 不到一分钟即可更改跑道 • 可选择远程控制系统功能 • 通过使用 COTS 处理器实现高可用性和卓越可靠性 • 提供固定式、可运输式和移动式版本 • 完全符合 ICAO 标准 • 内置监控
移动技术行业会计准则
这是 DigitalCommons@SHU 为您提供的免费开放访问。它已被 DigitalCommons@SHU 的授权管理员接受纳入学术节。如需更多信息,请联系 ferribyp@sacredheart.edu、lysobeyb@sacredheart.edu。

无钴模块化双移动
[1] https://aoanjrr.sahmri.com/annual-reports-2020。[2] F. Farizon、R. de Lavison、JJ Azoulai、G. Bousquet。无水泥氧化铝涂层双活动杯的结果:一项为期 12 年的随访研究。国际骨科杂志。1998;22(4) : 219-224。[3] C. Batailler、C. Fary、R. Verdier、T. Aslanian、J. Caton、S. Lustig。双活动杯的结果和适应症的演变:系统评价。[4] MS Abdelaal、E. Zachwieja、PF Sharkey。全髋关节置换术中发现模块化双活动髋臼部件严重腐蚀。关节置换术今日 8 (2021) 78-83。 [5] R. Civinini、A. Cozzi Lepri、C. Carulli、F. Matassi、M. Villano、M. Innocenti。使用模块化双活动假体和钴铬内金属头进行全髋关节置换术后患者血清金属离子水平升高的风险。《关节成形术杂志》35 (2020) S294-S298。[6] JM Kolz、CC Wyles、DW Van Citters、RM Chapman、RT Trousdale、DJ Berry。模块化双活动假体的体内腐蚀:一项检索研究。《关节成形术杂志》2020;35 (11): 3326-3329。[7] KA Sonn、RM Meneghini。模块化双活动结构中髋臼腐蚀引起的不良局部组织反应。《今日关节置换术》第 6 卷 (2020) 976-980 页。[8] WC Witzleb、J. Ziegler、F. Krummenauer、V. Neumeister 和 KP Guenther。《金属对金属全髋关节置换术和髋关节表面置换术中铬、钴和钼的暴露》。《矫形学报》2006 年;77:5, 697-705 页。[9] I. De Martino、GK Triantafyllopoulos、PK Sculco 和 TP Sculco。《全髋关节置换术中的双活动杯》。《世界矫形学杂志》2014 年;5(3): 180-187 页。



月球上的 3GPP 移动通信技术
摘要 — 根据 NASA 的 Artemis 计划,NASA 计划在未来几年内将宇航员送回月球。近期的任务将与前几次阿波罗任务类似,但要复杂得多。然而,与阿波罗不同的是,这次 NASA 打算建立基础设施,以支持人类长期驻扎并最终实现月球工业化。为了实现这一愿景,NASA 计划尽可能多地与商业和国际伙伴合作,而不是独自开发、建造和操作设备。月球基础设施最终将由许多公共和私人组织随着时间的推移而建设,以支持持续的人类探索、科学和工业活动。显然,如果没有一个能够为许多用户提供不同程度服务的强大的月球通信和导航系统,这一未来愿景将无法实现。在地球上,大多数人都非常熟悉第三代合作伙伴计划 (3GPP) 5G 移动电信技术。美国宇航局的空间技术任务理事会和美国宇航局的空间通信和导航办公室希望看到一个月球通信和导航网络,其功能与我们大多数人今天享受的蜂窝通信网络类似。建立这样的网络需要许多组织的参与。本文将概述美国宇航局对在月球表面使用 5G 及更高技术的兴趣;它还将描述美国宇航局内部基于 3GPP 标准或由美国宇航局资助的当前工作,例如诺基亚即将在月球表面进行的 4G/LTE 引爆点演示。

移动经济 - 俄罗斯和顺式
GSMA智能是全球移动运营商数据,分析和预测的确定来源,也是权威行业报告和研究的发行人。我们的数据涵盖了从阿富汗到津巴布韦的每个国家 /地区的每个运营商组,网络和MVNO。这是可用的最准确,最完整的行业指标集,包括数千万个单独的数据点,每天更新。GSMA情报依靠领先的运营商,供应商,监管机构,金融机构和第三方行业参与者来支持战略决策和长期投资计划。数据被用作行业参考点,并且经常被媒体和行业本身引用。我们的分析师和专家团队在各种行业主题上生产定期思考的研究报告。

基于人工智能的移动量子计算...
摘要 — 在本文中,我们讨论了如何使用人工智能中的约束满足问题概念对某些无线接入网络优化问题进行建模,并使用量子计算机大规模解决这些问题。作为一个案例研究,我们讨论了根序列索引 (RSI) 分配问题 — 一个重要的 LTE/NR 物理随机接入信道配置相关自动化用例。我们将 RSI 分配公式化为使用从商业移动网络获取的数据构建的二次无约束二进制优化 (QUBO) 问题,并使用基于云的商用量子计算平台对其进行求解。结果表明,量子退火求解器可以成功分配无冲突的 RSI。与众所周知的启发式方法相比,一些经典算法在解决方案质量和计算时间方面甚至更有效。非量子优势是由于当前实现是一种半量子概念验证算法。此外,结果取决于所使用的量子计算机的类型。尽管如此,所提出的框架具有高度灵活性,并且在利用移动网络自动化中的量子计算能力方面具有巨大潜力。