XiaoMi-AI文件搜索系统
World File Search System程中
Mehta医学工程中心
协调员MFCEM 2023年以高音,在Mehta医学工程中心就职典礼。旅程,从该想法的成立到其作为旨在促进工程解决方案解决医学问题的跨学科中心的认识,一直是视觉建设,团队合作,外展和协作的课程。MFCEM的慷慨支持。我坚信,MFCEM将在IIT Kanpur的生物科学和多元化工程领域的现有优势和领导力中受益匪浅。目前,MFCEM拥有来自各种学科的31位教职员工,例如生物科学,化学,化学工程,计算机科学和工程学和认知科学。不同领域的接近性将鼓励对现有医疗问题的合作和创新解决方案。在MFCEM工作的学生将获得跨学科培训和基础研究和转化研究的机会。我还想强调,MFCEM将在Laurus Labs和IIT Kanpur之间的行业 - 学院合作伙伴关系下建立研究部。它标志着在教师研究中的行业优先投资的开始,通过对基于腺相关病毒(AAV)的基于基因治疗载体的临床试验来促进发展和发展。

改革过程中咨询公司的政治经济学
现有研究解释了政府间组织中咨询公司的兴起(IGO)主要是管理管理的全球传播的证据。我们强调,顾问不仅是类似商业的世界文化规范的载体,而且是有争议的Igo政治和治理的一部分。我们解开了咨询黑匣子的包装,并重建了咨询公司如何在IGO中雇用和活跃。分析世界卫生组织(WHO)的经验,我们展示了IGO是如何非正式地“向咨询公司(以及他们的资助者)“开放”的,我们研究了其特权访问的后果在实践中是什么。顾问将声音和意见(包括他们自己的)策划为改革套餐,促进某些内容,并从事破坏对利益持有人的责任感的自我效率实践。顾问的关键立场可能会对咨询协议中排除的参与者产生无权影响,也可以通过咨询实践边缘化。我们通过放大了2015年Who倒退疟疾合作伙伴关系的顾问纳入改革来说明我们的一般讨论。我们的分析基于主要文件,主要线人访谈,非正式对话和参与者观察。

人工智能在改变患者护理和诊断流程中的作用
人工智能 (AI) 在医疗行业内患者护理和诊断流程的变革中发挥着越来越重要的作用。本文探讨了机器学习、自然语言处理和计算机视觉等 AI 技术对提高诊断准确性、简化患者护理和增强临床工作流程的变革性影响。通过分析最近的进展和案例研究,本文重点介绍了 AI 驱动的工具如何支持早期疾病检测、个性化治疗计划和患者数据的有效管理。它还探讨了与 AI 实施相关的潜在挑战和道德考虑,例如数据隐私和算法偏差。本文最后概述了 AI 在医疗保健领域的未来方向,强调需要继续研究、跨学科合作和监管框架,以最大限度地发挥 AI 的优势,同时解决潜在风险。通过这一探索,本文旨在全面了解 AI 在推进患者护理和诊断实践方面的作用,最终有助于建立更有效、更公平的医疗保健系统。

自然句子阅读过程中情绪处理的神经动力学
阅读时,我们的眼睛通过一系列注视和高速扫视浏览文本,以提取视觉信息。这一过程使大脑能够获得意义,例如关于书面文本中表达的情绪或情感价。大脑在自然阅读过程中如何提取单个单词的情感在很大程度上是未知的。这是由于自然成像的挑战,这导致研究人员之前采用高度控制、定时的逐字呈现缺乏生态效度的定制阅读材料。在这里,我们旨在评估自然阅读英语句子时词语情绪处理的电神经相关性。我们使用了一个公开的数据集,包括同步脑电图 (EEG)、眼动追踪记录和 400 个句子中的 7129 个单词的词级语义注释(苏黎世认知语言处理语料库;Hollenstein 等人,2018 年)。我们计算了注视相关电位 (FRP),即与注视开始时间锁定的诱发电反应。对从视觉和运动诱发活动中清除的 FRP 进行一般线性混合模型分析,结果显示,在注视开始后 224 – 304 毫秒间隔内,左中和右后电极簇中的积极和消极情绪条件之间存在地形差异。包括单词、短语和句子级情绪预测因子的额外分析显示,单词级情绪的 FRP 差异相同,但短语和句子级情绪没有额外的 FRP 差异。此外,从情绪匹配的 40 次试验平均 FRP 中对单词情绪(积极或消极)进行分类的解码分析显示平均准确率为 0.60(95% 置信区间:[0.58, 0.61])。控制分析排除了这些结果是基于眼球运动或语言特征的差异而不是词语情绪。我们的研究结果扩展了以前的研究,表明词汇语义刺激的情感价会在自然阅读过程中对单词注视产生快速的电神经反应。这些结果为在生态有效条件下识别词汇语义处理的神经过程提供了重要的一步,并可用于改进自然语言处理的计算机算法。

结核病依赖于空气传播过程中的保护基因,研究揭示了
团队承认实验并不是细菌生物物理传播的完全类似物。实际上,结核病是在飞过空气的液滴中携带的,随着它们的发展而蒸发。为了进行遗传分析,该团队必须与坐在盘子上的液滴合作。在这些限制下,他们尽可能地模仿液滴变速器,通过将板放在极干燥的腔室中以加速液滴的蒸发,类似于在飞行中经历的东西。

发育过程中的温度会影响神经元与果蝇行为之间的连通性,研究表明
在他们的研究中,科学家专注于果蝇的嗅觉电路,因为嗅觉决定了这些苍蝇的重要行为模式,对于它们的生存至关重要。他们发现,昆虫在p阶段暴露于昆虫的温度不仅对脑发育,而且对气味驱动的行为有影响。
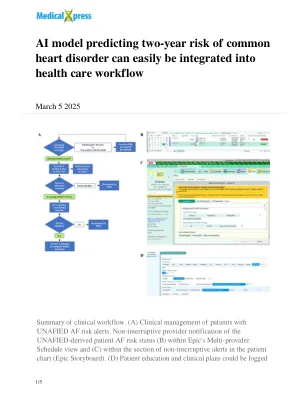
AI模型预测常见心脏病的两年风险可以轻松整合到医疗保健工作流程中
测试在现实世界中的实施和绩效,研究人员报告说,印第安纳波利斯埃斯基纳济卫生系统忙碌的医疗实践中的医生经常使用无人使用的风险预测模型发现易于使用而不是时间消费。最重要的是,参加研究的医生表明,他们认为这有助于改善患者护理。非侵入性,廉价的方法为主动筛查患者提供了一种实际选择,尤其是大量具有AFIB风险较高的个体。

定量宽松生产力吗?银行贷款在货币传输过程中的作用
欧洲中央银行(欧洲央行)定量宽松(QE)计划应该刺激实际经济并能够控制通货膨胀率。然而,主要是金融部门从资产购买计划中受益。传输没有根据需要进行,商业银行是货币创造者,因此流动性分销商处于其效率低下的中心。因此,本文旨在通过银行系统和相应的银行贷款渠道(BLC)来研究中央银行货币向欧元区经济的传播。使有关BLC,银行贷款和其他宏观经济变量的有效性的经济辩论清晰明了,分为生产力和非生产性。我们分析了这些领域对过度储量的外源性货币政策冲击的反应,在部署最小二乘和惩罚局部预测(LP)方法之前,使用不同的识别方案确定了这些领域。按照估计结果,可以得出结论,通过定量宽松的流动性增加不能刺激欧元区的增强经济活动的贷款,但相反,往往会使它不利。另一方面,它将贷款推向非生产性部门。此外,这一事实证实了这一事实,即尤其是住房部门的价格对量化宽松的冲击有显着反应,而相反,工业部门的生产者价格和通货膨胀并未受到非常规货币政策的影响。
电气工程中的博士学位论文以人为中心的控制型和连接的车辆
道路运输网络是世界上受伤和死亡的主要原因之一。与航空或铁路相比,道路运输的危险性更高,因为它持续依赖人类驾驶员以及经常发生不安全,复杂的情况场景。在过去的十年中,有一个重要的努力将车辆自动化引入道路运输以应对这些挑战。通过更换人类驾驶员,车辆自动化有可能彻底改变道路运输网络的安全性和效率。但是,在近年来,我们看到这种转变的进步速度较慢。我们将这种速度归因于车辆自动化的持续斗争,以处理出意外的处理问题的长尾巴,通常是由于遮挡,传感器不确定性甚至系统故障而引起的。解决意外的问题问题的一种方法是集成远程人类操作员,他们监视,协助以及在需要时控制车辆。尽管车辆自动化的关键目标是将人类带出 - 在循环中,但这些偏远的人类操作员构成了弹性层,有助于填补自动化差距,并减轻整个车辆操作中的故障。但是,通过集成远程人类运营商,我们冒着将新的人类错误引入道路运输网络的风险。在本文中,我们试图通过设计一个新的控制框架来应对这一挑战,该框架将远程人类操作员明确,安全地集成到了连接的车辆的工程和自动化中。我们的核心方式是密切检查远程人类操作员在监督连接车辆并将传统控制权调整为这些角色时扮演的角色。为此,我们详细介绍了一种结合形式方法和可及性分析以实现在线验证的新方法。我们表明,我们可以使用基于混合的逻辑树或基于汉密尔顿 - 雅各布(Hamilton-Jacobi)的可及性分析来协调一个称为时间逻辑树的计算结构,来验证操作员设计的规格。通过它们的模块化,时间逻辑树可确保当更改连接的车辆的规范时,可以实时更新验证结果。此外,我们表明,当使用汉密尔顿 - 雅各比(Hamilton-Jacobi)可达性分析构建时间逻辑树时,我们能够有效地合成符合特定符合特定的控制组的控制集,该控制集包含控制输入的控制输入,以确保其满足其要求。使用合成的控制集,我们设计了一个共享的自主系统,该系统允许远程操作可以在自动化不足的情况下安全地控制连接的车辆。通过利用这种方法,我们开发了一个框架,该框架允许远程人类操作员更改连接的车辆的驾驶规范,使车辆自动化以完成更新的规范,甚至在车辆的操作中进行干预,所有这些都可以保证车辆符合特定的特定方式。我们验证了使用5G蜂窝网络启用的小型连接的车辆测试台上开发框架的技术可行性和收益。

一个两个葡萄园的故事:分析地点特定地点的细菌和真菌群落葡萄葡萄的差异,来自近端葡萄园的葡萄酒,及其在单个酒厂加工过程中的变化
。cc-by-nd 4.0国际许可证(未经同行评审证明)获得的是作者/资助者,他已授予Biorxiv的许可证,以永久显示预印本。这是该版本的版权持有人,该版本发布于2025年3月6日。 https://doi.org/10.1101/2025.03.05.641676 doi:Biorxiv Preprint