XiaoMi-AI文件搜索系统
World File Search System管连接
心血管连接弹簧
2023年9月1日,医学博士Tiberio Frisoli,成为亨利·福特结构性心脏病中心(HF-CSHD)的医学主任,自2022年以来一直担任亨利·福特CSHD的副总监。弗里斯利(Frisoli)博士在亨利·福特·杰克逊医院(Henry Ford Jackson Hospital)开始了结构性心脏计划,并自2019年以来一直担任医疗总监。自2012年以来,他就一直在亨利·福特(Henry Ford)任职,首先是一名心血管医学研究员,然后他完成了介入的奖学金培训,并在亨利·福特(Henry Ford)曾在亨利·福特(Henry Ford)进行结构性心脏病(SHD)的一年奖学金。弗里斯科里(Frisoli)博士目前是四项活跃临床试验的主要研究者,有80多个出版物,并被公认为是杰出的临床医生,教育家和领导者。

牵引电机 6FRA6068(WAG9-WAP7) - RDSO 手册
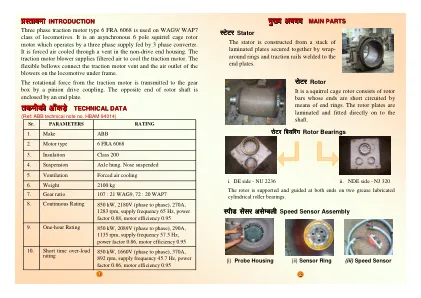
三相牵引电机类型 6 FRA 6068 用于 WAG9/WAP7 级机车。它是一种异步 6 极鼠笼转子电机,由三相转换器供电的三相电源运行。它通过非驱动端外壳中的通风口进行强制风冷。牵引电机鼓风机提供过滤空气来冷却牵引电机。柔性波纹管连接牵引电机通风口和机车底架上鼓风机的出风口。

Sensirion 差压传感器 - SOS.sk
SDP600 系列 SDP600 系列的特点是零漂移和出色的长期稳定性。数字化和完全校准的传感器能够实现非常高的灵敏度和出色的精度。由于出色的集成度和巧妙的封装,传感器体积小、速度快且可靠。SDP600 设计用于直接螺纹连接到带有 O 形圈密封的压力歧管,而 SDP610 设计用于管连接。在极低的压差下,它们具有出色的重复性和互换性,使 SDP600 系列成为过滤器监测、VAV 或医疗呼吸系统的最佳选择
光伏辅助自Vth取消CMOS整流器...
摘要 开发了一种用于射频能量收集的高效 CMOS 整流器(采用 0.18 µ m CMOS 技术)。为了在极低输入功率条件下也能高效运行,采用自 Vth 抵消 (SVC) 和光伏 (PV) 辅助技术的有效组合实现了基于倍压器的整流器。在该整流器中,二极管连接 MOSFET 的阈值电压 (Vth) 由直流偏置电压补偿,该偏置电压不仅由片上 PV 电池产生,还由整流器本身的输出电压产生。因此,即使在低输入功率条件下,整流器也能高效运行。此外,采用了使用简单 pn 二极管的偏置电压限制器来有效调节过度的 Vth 补偿,并在宽功率范围内实现整流器的高运行效率。在输入功率为 − 15 dBm、频率为 1 GHz、输出负载电阻为 10 k Ω 和光照度为 10 mW/m 2 的情况下,射频到直流功率转换效率 (PCE) 达到 30.8%。关键词:能量收集、无线电波、光伏、功率转换效率、整流器分类:能量收集设备、电路和模块

电子的热管理
预防灾难性的热力失败,定义为直接,热诱导的电子功能的总丢失,必须将电子热控制的主要和最重要的目的视为电子功能。ca骨失败可能是由于组件/系统性能的显着恶化或相关包装水平之一的结构完整性的丧失而导致的。在早期的微电体系统中,灾难性失败主要是功能性的,并认为是由于偏置电压的变化,再生加热产生的热失控和掺杂剂迁移,这些变化均发生在升高的晶体管连接温度下。尽管这些故障模式在设备开发过程中仍可能发生,但改进的硅模拟工具和热补偿的集成电路已在很大程度上使这些关注点安静了,并大大扩大了当今基于硅的逻辑和内存设备的工作温度范围。在使用CMOS设备用于高性能系统中仍然存在类似的问题。由于CMOS电路速度对温度的依赖性,可能有必要限制最高芯片温度以达到所需的周期时间和/或保持系统中的时机余量。
![arXiv:2102.00371v1 [quant-ph] 2021 年 1 月 31 日](/simg/8\8487126988e390485fb9ab77df743ee7d1821ed7.webp)
arXiv:2102.00371v1 [quant-ph] 2021 年 1 月 31 日
量子计算是一种革命性的信息处理形式,它能够比传统(经典)方法更快地解决某些计算问题 [1, 2]。量子信息用量子比特表示,量子比特可以存在于 0 和 1 的叠加态中。多个量子比特可以以纠缠态的形式制备,这些纠缠态通常具有指数数量的叠加态,从而为量子计算机提供强大功能。量子算法可以用涉及通用离散量子门操作的电路来表示,这些电路将量子比特纠缠在一起,类似于将晶体管连接在一起以在经典计算机中执行逻辑运算。最近,基于门的量子计算机已经作为云计算服务提供,由 IBM [3] 和亚马逊网络服务 [4] 托管。这些云提供商提供两种截然不同的硬件类型:离子阱和超导量子比特。每个系统中对量子电路的控制仅限于某些量子逻辑门操作,并且它们的量子位具有明显不同的架构和错误过程。在这里,我们报告了几个小量子电路的执行情况,并基于它们的性能,我们研究了这些量子系统的基本特性,例如量子位连接、门噪声及其累积以及状态准备和测量 (SPAM) 错误。通过在两个量子位之间执行越来越多的操作来测试量子位噪声、门噪声及其累积。SPAM 误差是通过在确定的量子位状态下初始化后立即测量量子位来提取的。通过实现具有不同电路复杂度级别的 Bernstein-Vazirani 量子算法 [5] 来间接探测量子位连接。
概念平台 65 (p-65) - 门户网站 Gov.br
图 1 - P-65 当前互连系统 ...................................................................... 8 图 2 - P-65 锚固系统的 3 x 3 布置 .............................................................. 20 图 3 - P-65 锚固系统的 3 x 3 布置 .............................................................. 20 图 4 - 底部电缆线 2 号与不明物体接触。图 5 - 3 号锚部分暴露 ...................................................................................... 24 图 6 - 3 号系泊缆绳的锚 ...................................................................................... 24 图 7 - 5 号缆绳的顶部电缆 ...................................................................................... 24 图 8 - 5 号系泊缆绳的锚 ...................................................................................... 24 图 9 - 6 号系统的锚 ............................................................................................. 24 图 10 - 6 号系统锚部分暴露 ............................................................................. 25 图 11 - 六个 P-65 立管连接透视图 ............................................................................. 26 图 12 - P-65 立管支撑细节 ............................................................................................. 26 图 13 - 将被拖曳并永久从 Enchova 油田移除的 P-65 平台 ............................................................................................................. 29 图 14 - 1 号绳索的钢缆进入导缆器滑轮........................................ 30 图 15 - 导缆器 \ 滑轮方向的全景图,无干扰........................................ 30 图 16 - 2 号绳索的钢缆进入滑轮........................................................ 30 图 17 - 导缆器 \ 滑轮方向的全景图,无干扰。 .................................. 30 图 18 - 钢缆从滑轮 3 号线路中退出 .............................................................. 30 图 19 - 钢缆从滑轮 3 号线路中退出 .............................................................. 30 图 20 - 钢缆从滑轮 6 号线路中退出 .............................................................. 31 图 21 - 朝向海床的全景,无干扰。 ......................... 31 图 22 - 1 号支撑的顶视图 .............................................................................. 31 图 23 - 根跨度 7361001B .............................................................................. 31 图 24 - 2 号支撑的顶视图 .............................................................................. 32 图 25 - 根跨度 C2511A05 ...................................................................................... 32 图 26 - 柔性管,海床方向 ...................................................................................... 32 图 27 - 柔性管,ZVM 方向 ...................................................................................... 32 图 28 - 3 号支撑的顶视图 ............................................................................. 33 图 29 - 根跨度 5000211 ..................................................................................... 33 图 30 - 柔性管道,海底方向 .............................................................................. 33 图 31 - 柔性管道,ZVM 方向 .............................................................................. 33 图 32 - 4 号支架的顶视图 .............................................................................. 33 图 33 - 根部部分 06378002 ................................................................................ 33 图 34 - 柔性管道,海底方向 ............................................................................. 34 图 35 - 柔性管道,ZVM 方向 ............................................................................. 34 图 36 - 5 号支架的顶视图 ............................................................................. 34 图 37 - 根部部分 0530901 ............................................................................. 34 图 38 - 柔性管道,海底方向(夹具) ............................................................. 34 图 39 - 柔性管道,ZVM 方向(夹具) ............................................................. 34 40 - P-65 / PCE-1 的 8'' OT 管道 (B) 的 R/F 法兰连接器 ............................................................................. 35 图 41 - 8” OT 跨越钢缆 ............................................................................................. 35

3S 暂停
机械外壳结构:挤压铝 6063-T5 合金外壳和 LED 托盘,带有压成型钢内部组件,以确保强度、对准和安装连接。我们的高品质压铸端盖经过精心设计,可以隐藏所有紧固件并将密封垫圈保留在灯具内部,同时完成此灯具的简洁外观。对准/组装:对准系统采用四点对准和连接方法,旨在创建更直的行并最大限度地减少各部分之间的接缝(现场组装)。四个对准销确保外部挤压铝轨对准,而拉紧螺钉固定外壳到外壳的连接。额外的对准饼干兼作遮光罩。长度:3S 的最小长度为 2 英尺(标称),可提供额外的 1 英尺增量(±0.030”)。提供更长的灯具排,并将配置 4 英尺、5 英尺、6 英尺、7 英尺和 8 英尺灯具。一个电源馈送的最大运行长度为 72 英尺。超过 72 英尺的连续运行需要第二个电源。安装方法/硬件:标准悬挂硬件包括 1/16 英寸直径、镀锌钢航空电缆(带有可调节和可锁定的镀镍电缆夹)和白色 18/5 SJT 电源线。标准硬件包括 60 英寸电源线和 54 英寸航空电缆,以适应距离天花板 48 英寸的安装距离。提供天花板遮篷。所有悬挂硬件都经过测试,并符合 UL1598 对负载/灯具支撑的要求。外部饰面:3S 提供白色和黑色聚酯粉末涂层,以确保耐用性。悬挂组件:灯具由 1/16 英寸镀锌航空电缆悬挂。电缆通过 ¼-20 螺纹天花板电缆管连接到天花板悬挂点,电缆管包含一个螺纹环来支撑馈电/吊架罩,从而无需拆除悬挂电缆即可接触接线盒/吊架,从而可以检查/维修导线而不必支撑灯具。馈电罩外径为 5 英寸,吊架罩外径为 2 英寸。电缆长度可指定为 48 英寸、96 英寸和 144 英寸悬挂长度。天花板类型选项为“T1”T 型网格、“T9”T 型网格、“SC”螺丝槽网格、“HC”硬天花板或“JB”硬天花板接线盒安装座。集成控制:3S 提供可选集成控制。传感器设计方便,可安装在孔径中,位于每个灯具的供电端。对于运行,每个灯具部分将配备一个离散传感器,以控制该特定部分。飞利浦 EasySense 是标准日光/占用传感器。需要 DALI 驱动器。如果您的项目需要未列出的组件或系统,请联系 Lumato 以查看要求。