XiaoMi-AI文件搜索系统
World File Search System粘滑

石墨烯/六角形的粘附和重建...
Table 1: 1L-G/1L-hBN stacking configurations and corresponding equilibrium separations, BEs, and breathing-mode (out-of-plane zone-center optical phonon) frequencies, obtained by fitting Equation 1 to DMC energy data obtained with both layers forced to adopt the lattice constant of G. C, B, and N atoms are shown as black, orange, and green balls, respectively.六边形sublattices A和B在配置中标记。I.偏移ℓ是从相应的B-N键中心的每个C-C键中心的平面位移。a 1和2是晶格向量,如图1b所示。由于在每种情况下使用相同的DMC 1L能量,因此不同配置的DMC平衡是相关的;因此,差异比绝对BES上的误差线所建议的更精确。相对BES的错误显示在表2中。
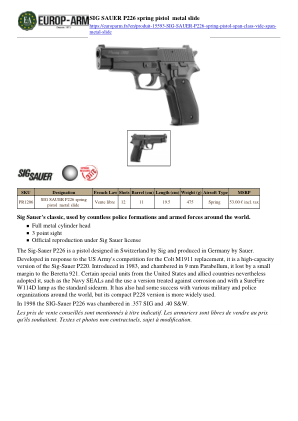
SIG SAUER P226 弹簧手枪金属滑套
西格-绍尔 P226 是一款由瑞士 Sig 公司设计、德国绍尔公司生产的手枪。它是为应对美国陆军对柯尔特 M1911 替代品的竞争而开发的,是西格-绍尔 P220 的大容量版本。它于 1983 年推出,发射 9 毫米帕拉贝鲁姆子弹,以微弱优势输给了伯莱塔 921。尽管如此,美国和盟国的某些特种部队还是采用了它,例如海豹突击队,并使用经过防腐蚀处理的版本并配有 SureFire W114D 灯作为标准随身武器。它在世界各地的军事和警察组织中也取得了一些成功,但其紧凑型 P228 版本使用更广泛。1998 年,SIG-绍尔 P226 发射 .357 SIG 和 .40 S&W 子弹。
为医疗补给任务的固定翼无人机设计滑模控制器
图 3.29:升降舵偏转信号 ...................................................................................................... 37 图 3.30:方向舵偏转信号 ...................................................................................................... 37 图 3.31:沿 X 方向的速度 B(“u”) ............................................................................................. 38 图 3.32:沿 Y 方向的速度 B(“v”) ............................................................................................. 38 图 3.33:沿 Z 方向的速度 B(“w”) ............................................................................................. 38 图 3.34:滚转速率(“p”) ............................................................................................................. 39 图 3.35:俯仰速率(“q”) ............................................................................................................. 39 图 3.36:偏航速率(“r”) ............................................................................................................. 39 图 3.37:滚转角度(“Phi”) ............................................................................................................. 40 图 3.38:俯仰角度(“Theta”) ........................................................................................... 40 图 3.39:偏航角(“Psi”)................................................................................................... 40 图 3.40:迎角
基于滑模控制方法的无模型控制算法及其在无人机系统中的应用
推荐引用 推荐引用 Kadungoth Sreeraj,Adarsh Raj,“基于滑模控制方法的无模型控制算法及其在无人机系统中的应用”(2019 年)。论文。罗彻斯特理工学院。访问自

利用智能玻璃体粘接修复复合材料和铝结构
任何修复的目的都是恢复结构的原有强度和刚度,并满足规定的质量平衡和空气动力学要求。一般来说,复合材料的修复要么用螺钉固定,要么用胶水固定。对于薄层压板或夹层复合材料,不允许使用螺栓修复,因此要进行粘合修复,最好采用齐平模板修复的形式。轨道车辆承受着很高的运行和交通负荷,损坏需要修复过程,而修复过程可能会因临时和计划外的停机而产生经济后果。因此,目标是使修复过程更简单、更快捷、更安全。修复复合材料时,湿法层压和真空工艺是耗时且多阶段的工艺。为了提高修复过程的可靠性,必须
Carney综合征双侧心房粘瘤的病例
1。引言C Arney Complex(CNC)是一种罕见的肿瘤综合征,其患病率是皮肤色素沉着,皮肤和心脏粘液瘤,以及其他内分泌和非内分泌肿瘤[1]。由于De de de de de de de de de de n de de de n de de n de de n de n de n de de n de te n de n de notic n decotic n decto n n decotic n dector n n dector n dectoction n n de niscomplexcanoccanoccurasafamilialialialialialialialialialialialial ext [1]。心脏粘膜瘤似乎是该复合物中最常见的非染色性病变,在20 E 40%的患者中发现[2]。被诊断出患有CNC的患者心脏粘液瘤预先发作的平均年龄为20年,在45%的病例中往往是多重的[1]。患者可能会出现心脏内障碍的症状,在这种症状中,粘液瘤可以完全阻塞瓣膜,并可能导致猝死。此外,粘液瘤本身可能引起栓塞事件。结果,心脏粘液瘤在CNC患者中的死亡率超过50%[1]。出于这个原因,超声心动图,心脏CT或磁共振成像(MRI)的定期筛查和早期检测对于检测这些肿瘤至关重要[1]。


用于堆叠芯片的芯片粘接膜 (DAF) ...
ESP7660-SC 是 AIT 广泛的 DAF 粘合剂之一,专为更高效的堆叠芯片应用而设计,具有以下优点:• 控制和定义粘合线厚度,标准应用为 10 和 20 微米,超薄堆叠应用为 3 和 5 微米。• 经过验证的低吸湿性,符合 MSL Leve1 封装要求。• 采用先进的聚合物分子工程进行应力管理。• AIT DAF 晶圆安装速度更快,在 10 秒内以 60-70°C 的滚动压力进行。• 预层压 DAF 的晶圆可以储存 3 个月,从而方便在多个地点进行制造。• 只要切割胶带兼容,就可以像没有 DAF 一样执行 UV 释放或剥离切割胶带和切割操作。• AIT 不直接提供预先层压到兼容切割胶带上的芯片贴装膜 (DAF) 粘合剂,其重复图案和指定间距与传统 DDAF 格式相同。 AIT 与晶圆安装设备合作,提供集成式整体材料-设备-工艺解决方案,以更低的成本实现更快的晶圆加工。AI Technology 提供以下形式的 DAF:1. 适用于任何尺寸晶圆的 DAF 预制件片或模切卷,覆盖在离型膜上 2. AIT DAF 材料的“液体版本”可用于定制预涂在任何尺寸厚度的晶圆上。AIT 液体版本的 DAF 具有适合筛选和旋涂的粘度。
无模型滑模控制算法(包括对真实四旋翼飞行器的应用)
摘要 - 滑模控制是一种鲁棒的非线性控制算法,已用于实现无人飞机系统的跟踪控制器,该控制器对建模不确定性和外部干扰具有鲁棒性,从而为自主操作提供出色的性能。无人飞机系统滑模控制应用的一个重大进步是采用无模型滑模控制算法,因为滑模控制实施中最复杂和最耗时的方面是结合系统模型推导控制律,这是每个单独的滑模控制应用都需要执行的过程。使用各种航空系统模型和真实世界干扰(例如离散化和状态估计的影响)在模拟中比较了各种无模型滑模控制算法的性能。结果表明,两种性能最佳的算法表现出非常相似的行为。这两种算法在四旋翼飞行器上实现(在模拟和使用真实硬件的情况下),并使用相同的状态估计算法和控制设置将其性能与传统的基于 PID 的控制器进行了比较。模拟结果表明,无模型滑模控制算法表现出与 PID 控制器相似的性能,而无需繁琐的调整过程。两种无模型滑模控制算法之间的比较表明,通过跟踪误差的二次均值测量,性能非常相似。飞行测试表明,虽然无模型滑模控制算法可以控制真实硬件,但在成为传统控制算法的可行替代方案之前,还需要进一步的特性描述和重大改进。无模型滑模控制和基于 PID 的飞行控制器都观察到了较大的跟踪误差,并且其性能对于大多数应用而言是不可接受的。两种控制器的性能不佳表明跟踪误差可以归因于状态估计中的误差。通过改进状态估计进行进一步测试将可以得出更多结论。关键词:无模型控制、滑模控制、鲁棒控制、飞行控制、无人机系统。1.简介

基于滑模方法的混合储能微电网频率协调控制策略
摘要 对于含可再生能源的微电网而言,频率稳定性至关重要,然而源荷不确定性会导致频率的恶化和储能设备的增加。为此,提出了一种基于滑模方法的含混合储能系统(HESS)微电网频率协调控制策略。首先,设计详细频率调节方案,将频率偏差和区域控制误差分成不同分量作为不同电源的功率参考值。其次,通过设计模糊控制器设定由超级电容和电池组成的HESS的功率阈值,以降低HESS的备用功率,避免不合理的功率输出。第三,建立含HESS的负载频率控制模型,并利用详细频率调节方案设计滑模控制。最后,通过不同算例的对比,验证了所提频率协调控制策略的有效性。