XiaoMi-AI文件搜索系统
World File Search System线路

物联网数字射线路径2技术稳定方法...
• 完全个性化的双面渐进镜片 • 可提供近视、远视和中视增强功能 • 针对可调节物体空间进行了优化 • 卓越的视觉敏锐度 • 改善近视区域视觉质量 • 改善许多处方的美观度 • 在任何注视方向的所有工作距离下都能实现精确舒适的对焦 • 几乎消除周边模糊 • 卓越的视觉质量,适合观看数码设备 • 更高的图像稳定性,减少游泳效应 • 在近视和中视时双眼视觉性能更佳
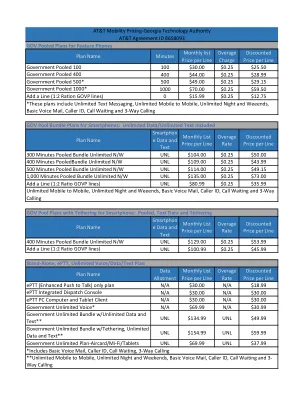
计划名称 分钟数 每月定价 每条线路 超额部分...
计划名称和说明 净价 FN 无限国家通话、短信、0GB(添加一条线路) 35.99 美元 FN 无限国家通话、短信、2GB(添加一条线路) 44.60 美元 FN 无限国家通话、短信、5GB(添加一条线路) 56.10 美元 FN 无限国家通话、短信、50GB(添加一条线路) 227.00 美元 FN 无限国家通话、短信、100 0GB(添加一条线路) 397.00 美元 FN 无限国家通话、短信、500GB(添加一条线路) 1,799.00 美元 FN 无限国家通话、短信、1000GB(添加一条线路) 3,500.00 美元
一种提高输电线路动态热额定值估计精度的数字孪生方法
摘要:输电线路热容量的限制对电力系统的安全性和可靠性起着至关重要的作用。动态热线额定值方法旨在估计输电线路的温度并评估其是否符合上述限制。现有的基于物理的标准是根据多个传感器测量的环境和线路条件来估计温度的。本文表明,采用数据驱动的数字孪生方法可以提高估计精度。所提出的方法利用机器学习,通过学习物理传感器数据和实际导体温度之间的输入输出关系,作为基于物理的标准的数字等价物。对真实数据的实验评估,将所提出的方法与 IEEE 738 标准进行比较,结果显示均方根误差减少了 60%,最大估计误差从 10°C 以上降至 7°C 以下。这些初步结果表明,数字孪生提供了更准确、更稳健的估计,可以作为传统方法的补充或潜在替代方案。
![b'given x,y \ xe2 \ x88 \ x88 {0,1} n,设置不相交在于确定某些索引i \ xe2 \ x88 \ x88 \ x88 [n]是否x i = y i = 1。我们研究了在分布式计算方案中计算此函数的问题,在分布式计算方案中,在长度路径的两个末端,输入x和y被给予处理器。该路径的每个顶点都有一个量子处理器,可以通过每回合交换O(log n)量子位,可以与其每个邻居进行通信。我们对计算设置脱节所需的回合数量感兴趣,而恒定概率远离1/2。我们称此问题\ xe2 \ x80 \ x9cset上的一条线\ xe2 \ x80 \ x9d。 Le Gall和Magniez [LM18]引入了线路上的集合脱节,以证明计算Congest模型中任意网络直径的量子分布复杂性的下限。但是,当处理器在路径的中间顶点上使用的局部内存受到严重限制时,它们只能提供下限。更确切地说,仅当每个中间处理器的局部内存由O(log n)Qubits组成时,它们的边界才适用。在这项工作中,我们证明了e \ xe2 \ x84 \ xa6 3 \ xe2 \ x88 \ x9a'](/simg/b/b8f591abd64b6da4584d55fe0cdc94d21656ec12.webp)
b'given x,y \ xe2 \ x88 \ x88 {0,1} n,设置不相交在于确定某些索引i \ xe2 \ x88 \ x88 \ x88 [n]是否x i = y i = 1。我们研究了在分布式计算方案中计算此函数的问题,在分布式计算方案中,在长度路径的两个末端,输入x和y被给予处理器。该路径的每个顶点都有一个量子处理器,可以通过每回合交换O(log n)量子位,可以与其每个邻居进行通信。我们对计算设置脱节所需的回合数量感兴趣,而恒定概率远离1/2。我们称此问题\ xe2 \ x80 \ x9cset上的一条线\ xe2 \ x80 \ x9d。 Le Gall和Magniez [LM18]引入了线路上的集合脱节,以证明计算Congest模型中任意网络直径的量子分布复杂性的下限。但是,当处理器在路径的中间顶点上使用的局部内存受到严重限制时,它们只能提供下限。更确切地说,仅当每个中间处理器的局部内存由O(log n)Qubits组成时,它们的边界才适用。在这项工作中,我们证明了e \ xe2 \ x84 \ xa6 3 \ xe2 \ x88 \ x9a'
b'given x,y \ xe2 \ x88 \ x88 {0,1} n,设置不相交在于确定某些索引i \ xe2 \ x88 \ x88 \ x88 [n]是否x i = y i = 1。我们研究了在分布式计算方案中计算此功能的问题,在该方案中,在长度路径的两个末端将输入X和Y提供给处理器。该路径的每个顶点都有一个量子处理器,可以通过每回合交换O(log n)Qubits来与其每个邻居进行通信。我们对计算设置不相交所需的回合数感兴趣,而恒定概率远离1/2。我们称此问题\ xe2 \ x80 \ x9cset脱节在行\ xe2 \ x80 \ x9d上。集合脱节,以证明在计算模型中计算任意网络的直径的量子分布式复杂性。但是,当处理器在路径的中间顶点上使用的局部内存受到严重限制时,它们只能提供下限。更确切地说,仅当每个中间处理器的本地内存由O(log n)量子位组成时,它们的边界才适用。在这项工作中,我们证明了E \ xe2 \ x84 \ xa6 3 \ xe2 \ x88 \ x9a'

物联网数字射线路径2技术稳定方法...
IOT Digital Ray-Path 2 技术允许在计算方法中智能地使用佩戴者自身的调节能力。换句话说,除了考虑眼睛相对于晶状体的位置和旋转的物理因素外,我们现在还考虑眼睛自然调节或改变焦点的能力。这项新技术给患者带来的好处包括大幅减少整个视野的斜像差、更高的舒适度和无可挑剔的视觉质量。
![初步沟通 基于人工智能的车载自动列车障碍物距离估计 Ivan ĆIRIĆ*、Milan PAVLOVIĆ、Milan BANIĆ、Miloš SIMONOVIĆ、Vlastimir NIKOLIĆ 摘要:本文提出了一种新方法,利用图像平面单应性矩阵来改进对摄像机和成像物体之间距离的估计。该方法利用两个平面(图像平面和铁轨平面)之间的单应性矩阵和一个人工神经网络,可根据收集的实验数据减少估计误差。SMART 多传感器车载障碍物检测系统有 3 个视觉传感器——一个 RGB 摄像机、一个热成像摄像机和一个夜视摄像机,以实现更高的可靠性和稳健性。虽然本文提出的方法适用于每个视觉传感器,但所提出的方法是在热成像摄像机和能见度受损场景下进行测试的。估计距离的验证是根据从摄像机支架到实验中涉及的物体(人)的实际测量距离进行的。距离估计的最大误差为 2%,并且所提出的 AI 系统可以在能见度受损的情况下提供可靠的距离估计。 关键词:人工神经网络;自动列车运行;距离估计;单应性;图像处理;机器视觉 1 简介 通过遵循自动化趋势,可以大大提高铁路货运的质量和成本竞争力,以实现经济高效、灵活和有吸引力的服务。今天,自动化和自主操作已经在公路、航空和海运中变得普遍。现代港口拥有自动导引车 (AGV),可将集装箱从起重机运送到轨道旁、仓库、配送中心,而自动驾驶仪是航空公司和大型货船的标准配置,不需要大量机上人员。自动驾驶汽车和卡车的发展已经进入了一个严肃的阶段。此外,轨道交通自主系统的发展主要出现在公共交通服务领域(无人驾驶地铁线路、轻轨交通 (LRT)、旅客捷运系统和自动引导交通 (AGT))。基本思想是使用一定程度的自动化,将操作任务从驾驶员转移到列车控制系统(例如 ERTMS)。根据国际电工委员会 (IEC) 标准 62290-1,列车自主运行 (ATO) 是高度自动化系统的一部分,减少了驾驶员的监督 [1]。对于完全自主的列车运行,列车操作员的所有活动和职责都需要由多个系统接管,这些系统可以感知环境并俯瞰现场,检测列车路径上的潜在危险物体并做出相应的正确反应 [2-6]。障碍物检测系统作为 ATO 系统的主要部分,障碍物检测系统需要根据货运特定和一般用例(例如 EN62267 和/或自动化领域的相关项目)来监控环境。为了满足严格的铁路标准和法规,障碍物检测系统 (ODS) 应在具有挑战性的环境和恶劣的能见度条件下工作。ODS 是一种具有硬件和软件解决方案的机器视觉系统(图 1),用于提供有关铁路上和/或其附近障碍物的可靠信息,并估算从系统到检测到的障碍物的距离 [7]。该系统需要实时运行,并在不同的光照条件下运行(白天、](/simg/4/4b79ebb2e692147077c5f05290fe6b1288b2aad1.png)
初步沟通 基于人工智能的车载自动列车障碍物距离估计 Ivan ĆIRIĆ*、Milan PAVLOVIĆ、Milan BANIĆ、Miloš SIMONOVIĆ、Vlastimir NIKOLIĆ 摘要:本文提出了一种新方法,利用图像平面单应性矩阵来改进对摄像机和成像物体之间距离的估计。该方法利用两个平面(图像平面和铁轨平面)之间的单应性矩阵和一个人工神经网络,可根据收集的实验数据减少估计误差。SMART 多传感器车载障碍物检测系统有 3 个视觉传感器——一个 RGB 摄像机、一个热成像摄像机和一个夜视摄像机,以实现更高的可靠性和稳健性。虽然本文提出的方法适用于每个视觉传感器,但所提出的方法是在热成像摄像机和能见度受损场景下进行测试的。估计距离的验证是根据从摄像机支架到实验中涉及的物体(人)的实际测量距离进行的。距离估计的最大误差为 2%,并且所提出的 AI 系统可以在能见度受损的情况下提供可靠的距离估计。 关键词:人工神经网络;自动列车运行;距离估计;单应性;图像处理;机器视觉 1 简介 通过遵循自动化趋势,可以大大提高铁路货运的质量和成本竞争力,以实现经济高效、灵活和有吸引力的服务。今天,自动化和自主操作已经在公路、航空和海运中变得普遍。现代港口拥有自动导引车 (AGV),可将集装箱从起重机运送到轨道旁、仓库、配送中心,而自动驾驶仪是航空公司和大型货船的标准配置,不需要大量机上人员。自动驾驶汽车和卡车的发展已经进入了一个严肃的阶段。此外,轨道交通自主系统的发展主要出现在公共交通服务领域(无人驾驶地铁线路、轻轨交通 (LRT)、旅客捷运系统和自动引导交通 (AGT))。基本思想是使用一定程度的自动化,将操作任务从驾驶员转移到列车控制系统(例如 ERTMS)。根据国际电工委员会 (IEC) 标准 62290-1,列车自主运行 (ATO) 是高度自动化系统的一部分,减少了驾驶员的监督 [1]。对于完全自主的列车运行,列车操作员的所有活动和职责都需要由多个系统接管,这些系统可以感知环境并俯瞰现场,检测列车路径上的潜在危险物体并做出相应的正确反应 [2-6]。障碍物检测系统作为 ATO 系统的主要部分,障碍物检测系统需要根据货运特定和一般用例(例如 EN62267 和/或自动化领域的相关项目)来监控环境。为了满足严格的铁路标准和法规,障碍物检测系统 (ODS) 应在具有挑战性的环境和恶劣的能见度条件下工作。ODS 是一种具有硬件和软件解决方案的机器视觉系统(图 1),用于提供有关铁路上和/或其附近障碍物的可靠信息,并估算从系统到检测到的障碍物的距离 [7]。该系统需要实时运行,并在不同的光照条件下运行(白天、
初步沟通 基于人工智能的车载自动列车障碍物距离估计 Ivan ĆIRIĆ*、Milan PAVLOVIĆ、Milan BANIĆ、Miloš SIMONOVIĆ、Vlastimir NIKOLIĆ 摘要:本文提出了一种新方法,利用图像平面单应性矩阵来改进对摄像机和成像物体之间距离的估计。该方法利用两个平面(图像平面和铁轨平面)之间的单应性矩阵和一个人工神经网络,可根据收集的实验数据减少估计误差。SMART 多传感器车载障碍物检测系统有 3 个视觉传感器——一个 RGB 摄像机、一个热成像摄像机和一个夜视摄像机,以实现更高的可靠性和稳健性。虽然本文提出的方法适用于每个视觉传感器,但所提出的方法是在热成像摄像机和能见度受损场景下进行测试的。估计距离的验证是根据从摄像机支架到实验中涉及的物体(人)的实际测量距离进行的。距离估计的最大误差为 2%,并且所提出的 AI 系统可以在能见度受损的情况下提供可靠的距离估计。 关键词:人工神经网络;自动列车运行;距离估计;单应性;图像处理;机器视觉 1 简介 通过遵循自动化趋势,可以大大提高铁路货运的质量和成本竞争力,以实现经济高效、灵活和有吸引力的服务。今天,自动化和自主操作已经在公路、航空和海运中变得普遍。现代港口拥有自动导引车 (AGV),可将集装箱从起重机运送到轨道旁、仓库、配送中心,而自动驾驶仪是航空公司和大型货船的标准配置,不需要大量机上人员。自动驾驶汽车和卡车的发展已经进入了一个严肃的阶段。此外,轨道交通自主系统的发展主要出现在公共交通服务领域(无人驾驶地铁线路、轻轨交通 (LRT)、旅客捷运系统和自动引导交通 (AGT))。基本思想是使用一定程度的自动化,将操作任务从驾驶员转移到列车控制系统(例如 ERTMS)。根据国际电工委员会 (IEC) 标准 62290-1,列车自主运行 (ATO) 是高度自动化系统的一部分,减少了驾驶员的监督 [1]。对于完全自主的列车运行,列车操作员的所有活动和职责都需要由多个系统接管,这些系统可以感知环境并俯瞰现场,检测列车路径上的潜在危险物体并做出相应的正确反应 [2-6]。障碍物检测系统作为 ATO 系统的主要部分,障碍物检测系统需要根据货运特定和一般用例(例如 EN62267 和/或自动化领域的相关项目)来监控环境。为了满足严格的铁路标准和法规,障碍物检测系统 (ODS) 应在具有挑战性的环境和恶劣的能见度条件下工作。ODS 是一种具有硬件和软件解决方案的机器视觉系统(图 1),用于提供有关铁路上和/或其附近障碍物的可靠信息,并估算从系统到检测到的障碍物的距离 [7]。该系统需要实时运行,并在不同的光照条件下运行(白天、

MDSPGP-6 活动 c (2) 架空公共设施线路塔、杆、锚和小型
地下公用设施的附属设施 经授权的架空公用设施线路塔、杆和锚基础活动必须符合以下适用活动特定条件、本许可证的所有一般条件以及任何项目特定的特殊条件。本活动授权在美国所有水域建造或维护地上公用设施线路的基础、塔、杆和锚以及地下公用设施的小型附属设施,前提是基础和附属设施具有必要的最小尺寸,并在可行的情况下为每个塔腿使用单独的基础(而不是较大的单个垫块)。地下公用设施线路的小型附属设施必须是公用设施线路使用和维护所必需的,包括人孔、消防栓、阀门和其他小型固定装置。(第 10 节和/或 404 节;美国所有水域)。A 类影响限制和要求:

DTC 230 KV线路和DTC变电站
(i)在新的100英尺宽的1右通行右上方的230 kV双电路传输线环上构建一个新的新型,通过切割230 kV beaumeade-beco线#2143位于位于结构#2143/12-13之间的交界处的2143号线#2143,毗邻该公司现有的beco beco beco beco beco beco dendatine(II)230 kveaumeadekv beaumeadedccv beaumeadedc(i)230 kv beaumeade(i)#(i)230 kv beaumeade(i)# Beco-DTC线#2249(“ DTC循环”)。从交界处,DTC环将沿建议的路线延伸约1.30英里,通常向东北向拟议的DTC变电站延伸。虽然提出的交界处位于现有的通行权中,但提议的DTC循环将在新的通行权上构建,并由15个双电路,单轴单轴镀锌钢杆和两个双电路镀锌钢2杆结构,利用三相双键双捆扎的768.2 ACS/TW类型的夏季转换能力,1,1,1,5157.1574,和
![b'given x,y \ xe2 \ x88 \ x88 {0,1} n,设置不相交在于确定某些索引i \ xe2 \ x88 \ x88 \ x88 [n]是否x i = y i = 1。我们研究了在分布式计算方案中计算此函数的问题,在分布式计算方案中,在长度路径的两个末端,输入x和y被给予处理器。该路径的每个顶点都有一个量子处理器,可以通过每回合交换O(log n)量子位,可以与其每个邻居进行通信。我们对计算设置脱节所需的回合数量感兴趣,而恒定概率远离1/2。我们称此问题\ xe2 \ x80 \ x9cset上的一条线\ xe2 \ x80 \ x9d。 Le Gall和Magniez [LM18]引入了线路上的集合脱节,以证明计算Congest模型中任意网络直径的量子分布复杂性的下限。但是,当处理器在路径的中间顶点上使用的局部内存受到严重限制时,它们只能提供下限。更确切地说,仅当每个中间处理器的局部内存由O(log n)Qubits组成时,它们的边界才适用。在这项工作中,我们证明了e \ xe2 \ x84 \ xa6 3 \ xe2 \ x88 \ x9a'](/simg/a/a3a16029f985bb8947bb960ec03cd84e9bb71486.webp)
b'given x,y \ xe2 \ x88 \ x88 {0,1} n,设置不相交在于确定某些索引i \ xe2 \ x88 \ x88 \ x88 [n]是否x i = y i = 1。我们研究了在分布式计算方案中计算此函数的问题,在分布式计算方案中,在长度路径的两个末端,输入x和y被给予处理器。该路径的每个顶点都有一个量子处理器,可以通过每回合交换O(log n)量子位,可以与其每个邻居进行通信。我们对计算设置脱节所需的回合数量感兴趣,而恒定概率远离1/2。我们称此问题\ xe2 \ x80 \ x9cset上的一条线\ xe2 \ x80 \ x9d。 Le Gall和Magniez [LM18]引入了线路上的集合脱节,以证明计算Congest模型中任意网络直径的量子分布复杂性的下限。但是,当处理器在路径的中间顶点上使用的局部内存受到严重限制时,它们只能提供下限。更确切地说,仅当每个中间处理器的局部内存由O(log n)Qubits组成时,它们的边界才适用。在这项工作中,我们证明了e \ xe2 \ x84 \ xa6 3 \ xe2 \ x88 \ x9a'
b'given x,y \ xe2 \ x88 \ x88 {0,1} n,设置不相交在于确定某些索引i \ xe2 \ x88 \ x88 \ x88 [n]是否x i = y i = 1。我们研究了在分布式计算方案中计算此功能的问题,在该方案中,在长度路径的两个末端将输入X和Y提供给处理器。该路径的每个顶点都有一个量子处理器,可以通过每回合交换O(log n)Qubits来与其每个邻居进行通信。我们对计算设置不相交所需的回合数感兴趣,而恒定概率远离1/2。我们称此问题\ xe2 \ x80 \ x9cset脱节在行\ xe2 \ x80 \ x9d上。集合脱节,以证明在计算模型中计算任意网络的直径的量子分布式复杂性。但是,当处理器在路径的中间顶点上使用的局部内存受到严重限制时,它们只能提供下限。更确切地说,仅当每个中间处理器的本地内存由O(log n)量子位组成时,它们的边界才适用。在这项工作中,我们证明了E \ xe2 \ x84 \ xa6 3 \ xe2 \ x88 \ x9a'

中国输电线路布局优化...
为消除我国电力输送瓶颈、提高可再生能源跨区消纳能力,建立了考虑电网稳定性和灵活性资源的输电线路布局多目标优化模型,确定了六大区域间最优线路路径、11种直流和交流输电技术的选择、输送容量以及跨区输电线路建成时间。研究结果表明,2039年西北向东和华北向中部的输电容量将分别比2018年增加265%和160%。2033年起800kV直流(10GW)将成为主要输电技术。2036—2039年是线路建设竣工的高峰期。中部和东部地区是我国风电和太阳能发电装机占比增长最快的地区。 2039年这些地区风电、光伏装机占比将是2018年的4~6倍,增加储能、提高需求侧响应可分别增加可再生能源上网电量1.7%、2.6%,但将导致新建线路分别减少2~6条、7~9条。