XiaoMi-AI文件搜索系统
World File Search System统一的
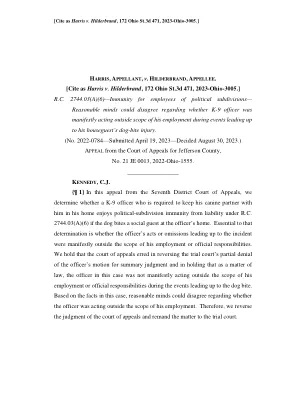
安全规划路线图;对齐统一的愿景
安全计划;6.Buildvisionofprocessforfamily7.Buildinformednetworkwithfamily8.Createexplanationforchildren(andeveryoneelse)9.BuildSafetyPlanwithparentsandnetworkSuccessive process where family demonstrate over time theycanmakechildrensafe,regularreview—honouringsuccessandutilising struggles.所有参与者均应在每次遇到theSafetyScales上对安全性进行评分。需要挖掘关键问题 - 贫民,触发器和压力fulltimesthatmakeabuse/nevelectmorelikelikely.thefamilymusteithercome comport或完全拥有所有规则。必须拒绝

统一的3D和4D全景分割通过动态移动网络
摘要 - 随着自动驾驶的快速进步,为其感应系统配备更全面的3D感知变得至关重要。但是,广泛探索的任务(例如3D检测或点云语义分段)重点是解析对象(例如汽车和行人)或场景(例如树木和建筑物)。在这项工作中,我们建议解决基于激光雷达的全景分段的具有挑战性的任务,该任务旨在以统一的方式解析对象和场景。特别是我们提出了动态转移网络(DS-NET),该网络是Point Cloud Realm中有效的全景分割框架。ds-net具有用于复杂LIDAR点云分布的动态移位模块。我们观察到,BFS或DBSCAN(例如BFS或DBSCAN)的常用聚类算法无法处理具有非均匀点云分布和不同实例大小的复杂自主驾驶场景。因此,我们提出了一个有效的可学习聚类模块,动态转换,该模块可以随时适应内核功能。为了进一步探索时间信息,我们将单扫描处理框架扩展到其时间版本,即4D-DS-NET,以进行4D Panoptic分割的任务,其中应为多个框架提供相同的ID ID预测。我们建议以更统一的方式求解4D Panoptic分割,而不是将跟踪模块附加到DS-NET上。该代码可在https://github.com/hongfz16/ds-net上公开获取。具体而言,4D-DS-NET首先通过对齐连续的LiDAR扫描来构造4D数据量,然后在其上执行时间统一的实例聚类以获得最终结果。进行了两个大规模自动驾驶激光雷达数据集(Semantickitti和Panoptic Nuscenes)的广泛实验,以证明所提出的溶液的有效性和出色性能。

统一的 AI 框架揭示基因 1 之间的深层相互关系
(未经同行评审认证)是作者/资助者。保留所有权利。未经许可不得重复使用。此预印本的版权所有者此版本于 2020 年 12 月 1 日发布。;https://doi.org/10.1101/2020.11.30.404087 doi:bioRxiv 预印本
使用Mediapipe进行统一的计算机视觉的空气画布...
摘要:在本文中,我们使用Mediapipe使用MediaPipe使用Unity Game Engine介绍了用于在3D环境中的计算机视觉的实现。在我们以前的工作中,我们发现,无论最初的参数如何,模拟通常都会导致快速灭绝。在此模型中,我们实施了与Unity的3D世界集成的空气画布和计算机视觉系统。我们的目标是通过合并3D演化来实现系统稳定,长期操作和更现实的模拟。使用Unity Game Engine,我们根据人工或现实世界地图创建并管理了一个封闭的3D生态系统环境。对生态系统的模拟和生成的数据分析可以作为进一步研究的起点,尤其是在可持续性方面。我们的系统公开访问,允许用户自定义和上传其参数,地图和对象,并定义继承和行为模式,从而使他们能够根据生成的数据来测试其假设。本文的目标不是创建和验证模型,而是提供IT工具。对于进化研究人员,该系统允许创建和呈现模拟,包括动画会议演示文稿,以增强可视化和参与度。使用3D模拟对于教育目的特别有价值,吸引学生并增加对3D互动世界的兴趣。学生可以观察生态系统的行为,自然选择如何支持适应性以及竞争如何影响物种。关键字:空气画布,计算机视觉,统一,3D模拟,生态系统

保护业务支柱:使用 Rubrik 实现统一的 SaaS 数据保护
Rubrik (NYSE: RBRK) 的使命是保护全球数据。借助 Zero Trust Data Security™,我们帮助组织实现业务弹性,抵御网络攻击、恶意内部人员和运营中断。Rubrik Security Cloud 由机器学习提供支持,可保护企业、云和 SaaS 应用程序中的数据。我们帮助组织维护数据完整性,提供可承受不利条件的数据可用性,持续监控数据风险和威胁,并在基础设施受到攻击时恢复业务数据。

一个统一的布局模式分析框架,具有深度因果估计
摘要 - 特征大小的减小和制造过程的增长会导致制造半导体设备的更多故障。因此,识别失败的根本原因布局模式变得越来越多地提高产量。在本文中,提出了一个基于布局感知诊断的新型布局模式分析框架,以有效地确定根本原因。在框架的第一个阶段,使用对比度学习训练的编码网络用于提取布局片段的表示形式,这些片段不变到琐碎的变换,包括偏移,旋转,旋转和镜像,然后将其聚类以形成布局模式。在第二阶段,我们通过结构性因果模型对任何潜在的根本原因布局模式与系统缺陷之间的因果关系进行建模,然后将其用于估计候选候选候选缺陷模式的平均因果效应(ACE),以识别真正的根本原因。对实际工业案例的实验结果表明,我们的框架的表现要优于具有更高准确性的商业工具,并且平均速度约为8.4加速。

simba:一个统一的框架,可探索和促进无电池系统的设计
无电池的传感设备已经越来越受欢迎,因为它们可以仅依靠收获的能量和环境友好的电容器运行。然而,尽管无电池解决方案数量增加,但它们的设计仍然是一项艰巨的任务。实际上,能源供应和需求之间的有限的能源存储容量以及产生的融合引入了新的设计权衡,这些折衷方案无法使用考虑恒定电源的常规工具进行探索。为了启用快速设计空间并促进无电池系统的开发,我们介绍了Simba,Simba是一个开源模拟框架,允许详细研究各种副组件之间的复杂相互作用。我们证明了Simba在两个案例研究中的好处,对实验进行了评估,以现实世界,最先进的电池设备为目标。首先,我们说明了Simba如何探索不同组件配置之间的依赖性并评估其对整体系统性能的影响。除其他外,我们表明,更改存储容量或稍微修改负载行为可以将数据吞吐量提高到最高5倍。1𝑥和9。7𝑥。第二,我们介绍了Simba如何自动选择优化无电池系统操作(例如,其检查点的机械师)的关键参数,并展示Simba如何基于现实世界的能源收集痕迹来启用性能评估。

机器学习方法和统一的数据集改善了免疫原性的新抗原预测
Markus M€Uller,1,2,2,3,4, * Florian Huber,1,2,3 Marion Arnaud,1,2,3 Anne I. Talita Gehret, 1, 2, 3 Aymeric AUGER, 1, 2, 3 Brian J. Stevenson, 3, 4 George Coukos, 1, 2, 3, 5 Alexandre Harari, 1, 2, 3, 5 and Michal Bassani-Sternberg 1, 2, 3, 5, 6, * 1 Ludwig Institute for Cancer Research, University of Lausanne, 25a, 1005 Lausanne, Switzerland 2肿瘤学系,中心医院维多伊大学(CHUV),Rue du Bugnon Rue du Bugnon 46,1005 Lausanne,瑞士洛桑3,瑞士1011 Agora Cancer Research Center,瑞士4 SIB SWISS SWISS Institute of BioIninformitics,Sorge Districtics,Sorge Districtics,Sorgeanne,Switzerland,Switzerland 5 (CHUV),瑞士洛桑(Lausanne),卢桑(Lausanne),第46页,瑞士6铅联系 *通信:markus.muller@chuv.ch(M.M.M.),michal.bassani@chuv.ch(M.B.-S.)https://doi.org/10.1016/j.immuni.2023.09.002

统一的电力质量调节素太阳能电动电动汽车充电...
(临床扫描仪中常用的B Max的两倍)。平均扩散率(MD),裂纹各向异性(FA),螺旋角(HA)和次级特征向量角(E2A)计算B = [100,450] S∕MM 2和B = [100,450] S∕MM 2和B = [100,1000] S∕MM 2的M 2和M 3和M 3。结果:M 3的MD值略高于M 2,其中δMD= 0。05±0。05 [×10 - 3 mm 2 s](p = 4 e -5)对于B max = 450 s∕mm 2和δmd= 0。03±0。03 [×10 - 3 mm 2 s](p = 4 e -4)对于B max = 1000 s ∕毫米2。通过将B MAX从450 S∕mm 2(δMD= 0。06±0。04 [×10 - 3 mm 2 s](p = 1。6 e -9)对于m 2和δmd = 0。08±0。05 [×10-3 mm 2 s](p = 1 e -9)对于m 3)。FA,E2A和HA之间的差异在不同方案中并不显着(P>0。05)。结论:这项工作表明体内心脏DWI的B值更高,运动补偿梯度梯度波形比使用相比使用。将运动补偿顺序从m 2增加到m 3,最大b值从450 s ∕ mm 2增加了MD值,但是FA和角度指标(HA和E2A)保持不变。我们的工作为心脏DWI的下一代MR扫描仪铺平了道路,具有高性能梯度系统。