XiaoMi-AI文件搜索系统
World File Search System编队

Microsoft Word - X 射线天文学编队飞行任务的相对导航和指向误差预算.docx
本文介绍了一种新型编队飞行任务 Cal X-1 的相对导航和卫星间指向的误差预算。尽管进行了广泛的地面校准活动,但轨道 X 射线天文台的交叉比较表明,测量的天体源通量存在超过 10% 的系统性差异。Cal X-1 任务将通过使用一对编队飞行的 SmallSat 建立在轨 X 射线通量标准来解决这一问题。第一艘航天器将搭载一台 X 射线望远镜,而第二艘航天器将搭载一个绝对校准的 X 射线源。任务设计需要精确的卫星间指向,但由于尺寸、重量、功率和成本方面的限制,无法使用专用硬件。本文试图证明通过先进的相对导航技术可以满足具有挑战性的卫星间指向要求。高保真模拟展示了合适的相对导航系统的性能。接下来,开发一个数学模型,该模型考虑了相对导航、姿态确定和航天器结构组装引起的误差,以便计算指向知识误差。通过将该指向知识误差与 Cal X-1 任务的要求进行比较,证明了所提出的卫星间指向方法的可行性。
婴儿潮一代
SAPR VA:LCDR Rudewicz | CMEO:LT Cooke | 自杀预防官:Capt Sauers/LT Flesher 自杀预防资源:1-800-273-8255 常规说明 1. 如果您连续 3 个工作日没有安排,请通知 ODO。 2. 周二晚上完成工作的选拔者应于周三 07:30 向 STUCON 报告选拔文件。 3. 编队类 SNA:编队 FTI、编队补充和中队 SOP。 4. C4204/5 之后完成 C1206 CAI。 5. C4601 之后完成 C1207 CAI 并从安全部门领取编队补充。 6. I4104 之后,完成 SY0302 FMS TRAINER 2 以进入 I3201。完成后联系 ODO。 7. TAC 78 是所有编队飞行的备用频率。

海军航空训练长 先进直升机...
无线电仪表(PAC)(RI20) .............................................................................. VI-14 无线电仪表(PNAC)(CPI20) .............................................................................. VI-17 无线电仪表 – 应急程序(PAC)(RI30) ........................................................................ VI-19 无线电仪表(PAC)(RI31) ...................................................................................... VI-21 无线电仪表(PNAC)(CPI31) ...................................................................................... VI-23 无线电仪表(RI40) ............................................................................................. VI-25 无线电仪表(PAC)(RI32) ............................................................................................. VI-28 无线电仪表(PNAC)(CPI32) ............................................................................................. VI-31 无线电仪表(RI41) ............................................................................................. VI-33 无线电仪表(RI42)................................................................................ VI-36 仪表检查飞行(RI43).............................................................................. VI-38 无线电仪表独奏(RI44).............................................................................. VI-40 第七章物流培训 陆上物流程序 (LND01) .......................................................................... VII-1 陆上物流 (LND02) .......................................................................................... VII-2 陆上物流 (LND30) ........................................................................................ VII-3 陆上物流 (LND40) ........................................................................................ VII-5 海上物流 (SEA01) ............................................................................................. VII-7 海上物流 (SEA30) ............................................................................................. VII-8 搜索和救援程序 (SAR01) ............................................................................. VII-10 搜索和救援 (SAR30) ............................................................................................. VII-11 搜索和救援 (SAR40) ............................................................................................. VII-13 第八章地形飞行训练 地形飞行(TRF01) .............................................................................. VIII-1 地形飞行(TRF30) .............................................................................. VIII-2 地形飞行(TRF40) .............................................................................. VIII-4 地形飞行(TRF41) ................................................................................ VIII-6 地形飞行(TRF31) ................................................................................ VIII-8 夜间地形飞行(TRF42) ............................................................................. VIII-10 第九章编队训练编队 (FRM01) ................................................................................................ IX-1 编队审查 (FRM02) ................................................................................................ IX-2 编队 (FRM30) ................................................................................................ IX-3 编队 (FRM40) ................................................................................................ IX-5 编队导航 (FRM41) ...................................................................................... IX-7 NVG 编队 (FRM31) ............................................................................................. IX-9 NVG 编队 (FRM42) ............................................................................................. IX-11
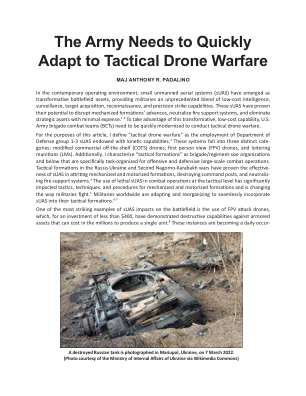
陆军需要快速适应战术无人机战争
出于本文的目的,我将“战术无人机战争”定义为使用国防部 1-3 组具有动能能力的 sUAS。3 这些系统分为三个不同的类别:改进的商用现货 (COTS) 无人机、第一人称视角 (FPV) 无人机和巡飞弹 (LM)。此外,我将“战术编队”描述为旅/团级及以下组织,专门为进攻和防御性大规模作战行动而组织。俄乌战争和第二次纳戈尔诺-卡拉巴赫战争中的战术编队已经证明了 sUAS 在消耗机械化和机动化编队、摧毁指挥所和压制火力支援系统方面的有效性。4 在战术层面的作战行动中使用致命的 sUAS 已显著影响机械化和机动化编队的战术、技术和程序,并正在改变军队的作战方式。5 世界各地的军队都在进行调整和重组,以将 sUAS 无缝纳入其战术编队。6-7
2021 年战略物资(管制)令
“自动化指挥及控制系统”(ML11) 指输入、处理和传输对所指挥的编队、主要编队、战术编队、单位、舰船、分队或武器的有效运作至关重要的资讯的电子系统。此等系统是通过使用电脑及其他为支持军事指挥及控制组织职能而设计的专用硬件而实现的。自动化指挥及控制系统的主要功能为高效地自动收集、积累、储存和处理资讯;显示影响作战行动准备和进行的情况和环境;根据任务或行动阶段,进行战役及战术计算以在兵力编队或作战序列或战斗部署的要素之间分配资源;准备数据以供在行动或战斗的任何阶段了解情况和作出决策;以及以电脑模拟行动;

展出的飞机 - 印度航空
aeroindia.gov.in › Updated_assets PDF 2023 年 2 月 13 日 — 2023 年 2 月 13 日 “Netra”编队将有 5 架飞机,它们将作为箭头编队运行,...作为宽松静态稳定性、数字飞行编队线控(FBW)、飞行控制...
Thomas Chevet、Cristina Stoica Maniu、Cristina Vlad、Youmin Zhang。使用 MPC 技术进行基于 Voronoi 的 UAV 编队部署和重新配置。国际无人机系统会议,ICUAS'18,2018 年 6 月,美国德克萨斯州达拉斯。第 9-14 页,10.1109/ICUAS.2018.8453342。hal-01768188
摘要 —本文介绍了一种基于分散 Voronoi 的线性模型预测控制 (MPC) 技术,用于在有界区域内部署和重构由无人机 (UAV) 组成的多智能体系统。在每个时刻,该区域被划分为与每个 UAV 智能体相关联的不重叠的时变 Voronoi 单元。编队部署目标是根据每个 Voronoi 单元的 Chebyshev 中心将智能体驱动到静态配置中。所提出的基于 MPC 的编队重构算法不仅允许有故障/不合作的智能体离开编队,还允许恢复/健康的智能体加入当前编队,同时避免碰撞。仿真结果验证了所提出的控制算法的有效性。

ITASAT#2 任务卫星编队建立的轨道分析
摘要 — ITASAT#2 任务是一项即将进行的纳米卫星任务,旨在研究电离层等离子体气泡并使用三个编队飞行的立方体卫星进行地理定位研究。编队飞行任务通常对卫星相对状态的几何配置有严格的限制。为了使立方体卫星正确实现其所需的空间分布,必须仔细规划和执行任务的获取或建立阶段。考虑到这一点,当前的工作旨在分析两种可能的编队配置建立阶段所需的初步 ∆ V 预算:共轨道串珠和非共面振荡器。为此,分析和模拟了必要的相位和平面外机动。

编队控制无人直升机移动目标跟踪障碍和维护连接F. Ghaderi,A。Toloei *部门 *部门
这项研究涉及无人直升机的控制,强调形成控制,目标跟踪,避免障碍和连续性维护。该研究采用终端滑动模式控制(TSMC)来调节直升机的位置和态度,而通用的预测控制(GPC)策略则用于通过领导者追随者的方法来形成控制。使用人工电位(APF)方法实现避免障碍物。仿真结果表明,在六个不同的任务中,快速收敛时间不到三秒钟,这表明直升机在保持静态障碍和动态障碍的同时保持其形成的能力。最初的三个任务涉及在三角形形成中组织的三架直升机,成功地避免了障碍物并以低于1%的错误率保持连续性。随后的三个任务,涉及五架五角形配置的五架直升机,类似地说明了有效的导航和动态目标跟踪。值得注意的是,领导直升机始终跟踪静态和动态目标,以确保形成的完整性。这项研究通过探索多代理直升机操作和障碍物遍历的复杂性来促进该领域,从而强调了在动态场景中保持连通性和形成的关键重要性。这些发现强调了拟议的控制策略的有效性,为包括军事和民用领域在内的各个部门的未来应用提供了宝贵的见解。