XiaoMi-AI文件搜索系统
World File Search System编队
编队的现实路线图,飞行空间干涉法
了解经济不确定性冲击在工业分类水平上的影响对于财政和货币政策对经济不确定性冲击的反应至关重要。我们使用澳大利亚季度数据从1987年:2到2018:4估算了SVAR模型:4。本文的结果强调,各个行业对经济不确定性冲击具有独特的反应,并不一定反映了更广泛的总体宏观经济的反应。我们找到了以下风格化的事实; i)在澳大利亚的投资,产出和就业方面,建筑业是经济不确定性冲击受到经济不确定性冲击的影响最大的行业; ii)金融和保险服务行业还经历了这些冲击的大幅下降,尤其是投资和就业指标; iii)证明经济不确定性对政府发挥重要作用的采矿,医疗保健和社会援助以及公共管理和安全行业的影响较小。

激光交联任务编队飞行的 6U 纳米卫星设计
随着近年来星载数据量的不断增长,自由空间光学 (FSO) 或激光通信系统正备受关注,因为它们可以实现超过 1 Gbps 的超高数据速率。使用红外光学终端和纳米卫星的超高速卫星间链路系统 (VISION) 是一项技术演示任务,旨在建立和验证使用两颗编队飞行的 6U 纳米卫星的激光交联系统。最终目标是在数千公里的距离上实现 Gbps 级的数据速率。为了建立空间对空间激光通信,每个卫星的有效载荷光轴应在交联过程中精确对齐。有效载荷是激光通信终端 (LCT),包括可部署空间望远镜 (DST),它可以提高光学链路性能。6U 纳米卫星总线采用商用现货 (COTS) 组件设计,以实现敏捷系统开发。为了实现精确的编队飞行,该平台配备了带有 GNSS 接收器和 RF 交联器的相对导航系统、星跟踪器、3 轴反作用轮 (RW) 和推进系统。提出的激光交联系统概念将有助于未来构建具有高速和安全链路的 LEO 通信星座。

通过自主多智能体编队实现持续空间观测
传感平台必须在规模和复杂程度上取得进步,以支持地球和空间科学、情报、监视和侦察 (ISR) 以及行星探索等领域日益雄心勃勃的任务。分布式持久观测平台有可能通过改善区域覆盖、增强态势感知以及更快地识别趋势和变化,在下一代任务中发挥关键作用。美国宇航局兰利研究中心的“空间持久观测多智能体集群” (MACPOS) 项目正在开发构成此类平台的自主异构编队的关键技术。研究重点包括自组装智能体集群的动态编队协商、分布式运动规划和协调轨迹执行。自适应领导者-追随者编队协商允许智能体在必要时聚类和分离,以适应正常和新的任务目标。协调运动规划和执行可维持编队,同时确保环境中的智能体和障碍物之间的安全分离距离。这些功能使 MACPOS 与 NASA 的太空和地面现场组装计划相一致,该计划通过自主多智能体系统的基础技术开发来实现。本文介绍了 MACPOS 项目的概述和早期进展。我们描述了单个智能体和整个舰队的系统架构。给出了规划、控制和计量子系统的设计考虑。最后,我们讨论了计划中的项目里程碑和预期的发展进程。
提高 Raven SUAS 在骑兵编队中的实用性和机动性
RQ-11B 大渡鸦小型无人机 (SUAS) 是步兵连指挥官的有机空中情报收集平台。大渡鸦的射程约为 10 公里,并具有红外和日间传感器功能,这为其增添了价值。即使具备这些功能,许多指挥官仍然对大渡鸦不感兴趣,因为它的尺寸、用户界面、可靠性以及对两人机组人员的要求,与最新的商用现货 (COTS) 技术相比,所有这些要求都有些笨重。除了这些因素之外,在整个全球反恐战争期间,步兵营和连队都经常拥有专用的有人或无人情报、监视和侦察 (ISR) 平台,从 AH-64 空中武器小组 (AWT) 到 MQ-1 或 MQ-9 捕食者/收割者,甚至是多层组合。
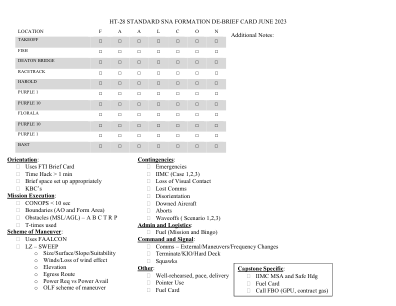
ht-28 标准 sna 编队汇报卡 2022 年 7 月
紧急情况 IIMC(情况 1、2、3) 失去目视接触 丢失通信 迷失方向 飞机坠毁 中止 复飞(情景 1、2、3) 行政和后勤:
使用 MPC 技术进行基于 Voronoi 的无人机编队部署和重新配置
摘要 —本文介绍了一种基于分散 Voronoi 的线性模型预测控制 (MPC) 技术,用于在有界区域内部署和重构由无人机 (UAV) 组成的多智能体系统。在每个时刻,该区域被划分为与每个 UAV 智能体相关联的不重叠的时变 Voronoi 单元。编队部署目标是根据每个 Voronoi 单元的切比雪夫中心将智能体驱动到静态配置中。所提出的基于 MPC 的编队重构算法不仅允许故障/不合作的智能体离开编队,还允许恢复/健康的智能体加入当前编队,同时避免碰撞。仿真结果验证了所提出的控制算法的有效性。

采用广义粒子群优化的多旋翼无人机编队路径规划
关键词 路径规划,粒子群优化,广义 PSO,光学避障,无人机,无人机编队。摘要 本文研究了多旋翼无人机(UAV)在编队形状中协作检查周围表面的路径规划技术问题。我们首先将问题描述为在复杂空间中规划编队质心路径的联合目标成本。然后提出了一种路径规划算法,称为广义粒子群优化算法,用于在避开障碍物并确保飞行任务要求的同时构建最佳的可飞行路径。然后结合路径开发方案为每架无人机生成相关路径以保持其在编队配置中的位置。进行了仿真、比较和实验以验证所提出的方法。结果表明,使用 GEPSO 的路径规划算法是可行的。缩写

师级近距防空司令部:使用历史案例构建未来编队
2003 年 3 月的伊拉克自由行动期间,查尔斯·布兰森上校在布雷德利后卫战车上执行地面支援任务时获得了银星勋章。当时担任上尉兼炮台指挥官的布兰森接到了第 3 步兵师第 1 旅指挥官的战术任务命令。他的任务是利用他的两个布雷德利后卫战车排保卫一座桥梁,同时还被分配了 3-69 装甲部队的一个坦克排。11 根据布兰森的银星勋章表彰,“防空炮台指挥官率领布雷德利和坦克连队发动攻击是史无前例的。” 12 布兰森在保卫桥梁和为 3-69 装甲特遣队取得成功方面采取了大胆而积极的行动。我们需要训练我们的防空领导人和士兵,以便能够执行任何任务。

驾驶员辅助卡车编队行驶:佛罗里达州政府机构的考虑事项
图片列表 图 1:美国各州定性与定量跟车距离规则 47 图 2:允许商业 DATP 运营的州 52 图 3:欧洲卡车队列挑战赛车辆拖车上的文字标记 54 图 4:带协调 V2V 操作的制动应用时机 71 图 5:TRC II 型燃油经济性测试节省的燃油百分比 77 图 6:TNO 对高级卡车队列优势的总结 83 图 7:队列配对算法的示例结果 85 图 8:卡车队列的 TTI 交通模拟结果 110 图 9:EPTC 高空视频:两辆卡车队列接近匝道 113 图 10:EPTC 高空视频:队列分离并产生更大的间隙 113 图 11:EPTC 高空视频:合并卡车接受 3 米的间隔 113图 12:EPTC 高架视频:并线卡车在超车卡车 114 前面切入
基于代理的飞机机队调度路径方法...
本文研究了一种基于Agent的考虑空间约束的舰载机编队调度路径规划方法,以最小化编队调度时间为目标。首先介绍编队调度环境,然后基于多Agent对舰载机编队调度过程进行建模,本文主要考虑两个Agent:空间Agent和飞机Agent。其次,提出一种基于改进A*算法的舰载机协同路径规划全局优化方法,考虑等待策略和绕行策略,以调度时间为优化目标。最后,对10架舰载机编队进行分析,验证所提优化方法。仿真结果表明,优化算法可以实现多架飞机的同时调度,提高了调度系统的效率和可用性。关键词:路径规划,Agent,改进A*算法,动态调度,舰载机编队