XiaoMi-AI文件搜索系统
World File Search System置信度

caril:自主驾驶的模仿学习中的信心回归
摘要 - 基于端到端视力的模仿学习已直接从专家演示中学习控制命令来证明自主驾驶的有希望的结果。然而,传统方法依赖于基于回归的模型,这些模型提供了精确的控制,但缺乏一致性估计或基于分类的模型,这些模型提供了置信度得分,但由于分离而降低了精度。此限制使量化预测行动的可靠性并在必要时应用更正是一项挑战。在这项工作中,我们引入了双头神经网络体系结构,该架构既集成回归和分类负责人,以提高模仿学习中的决策可靠性。回归负责人预测了连续的驾驶动作,而分类头则估计了置信度,从而实现了一种调整机制,该校正机制可以调整低信心情景中的动作,从而增强了驾驶稳定性。我们在Carla模拟器内的闭环环境中评估了我们的方法,证明了其检测不确定的动作,估计信心并应用实时校正的能力。实验结果表明,我们的方法可降低车道偏差,并提高了传统精度高达50%,表现优于常规回归模型。这些发现突出了分类指导置信度估计的潜力,以增强基于视觉的模仿学习对自主驾驶的鲁棒性。源代码可在https:// github上找到。com/elahedlv/profester_aware_il。

肠促胰岛素药物对超重或肥胖成人及有/无 2 型糖尿病患者的血糖控制、体重和血压的比较效果:系统评价和网络荟萃分析
方法:在 PubMed、Cochrane、Web of Science、Embase、CNKI 和万方数据库中进行系统搜索,检索日期截至 2024 年 5 月 12 日。纳入干预时间至少为 12 周的随机对照试验 (RCT)。目标人群包括超重或肥胖的个体,无论是否患有 2 型糖尿病。符合条件的研究将多受体药物与安慰剂或其他多受体药物进行了比较。主要结果是减轻体重、糖化血红蛋白 (HbA 1c )、空腹血糖 (FPG)、血压变化和不良事件。使用 Cochrane 偏倚风险工具 (ROB2) 第 2 版评估偏倚风险,并使用频率学派方法进行随机效应网络荟萃分析。使用网络荟萃分析置信度 (CINeMA) 框架评估效果估计的置信度。
2025 Edelman Trust晴雨表全局报告
2025 Edelman Trust晴雨表。pop_emo。有些人说他们担心很多事情,而另一些人则说他们很少担心。我们对您的担心感兴趣。具体来说,您对以下每种情况有多少担心?9点标度;前4个盒子,担心。 属性的一半属性。 一般人口,26-mkt avg。 使用t检验设置在99%+置信度水平上测试了同比变化的显着性。 历史最高和低点分析包括至少五个数据收集浪潮的国家。9点标度;前4个盒子,担心。属性的一半属性。一般人口,26-mkt avg。使用t检验设置在99%+置信度水平上测试了同比变化的显着性。历史最高和低点分析包括至少五个数据收集浪潮的国家。
在数字胸部 X 射线图像诊断中引入人工智能 (AI)...
公司C 检测结节、肿块阴影、浸润阴影和气胸,并以从蓝色(低)到红色(高)的渐变颜色显示存在异常区域的可能性(确定性)。检测到的区域的置信度也显示为分数。
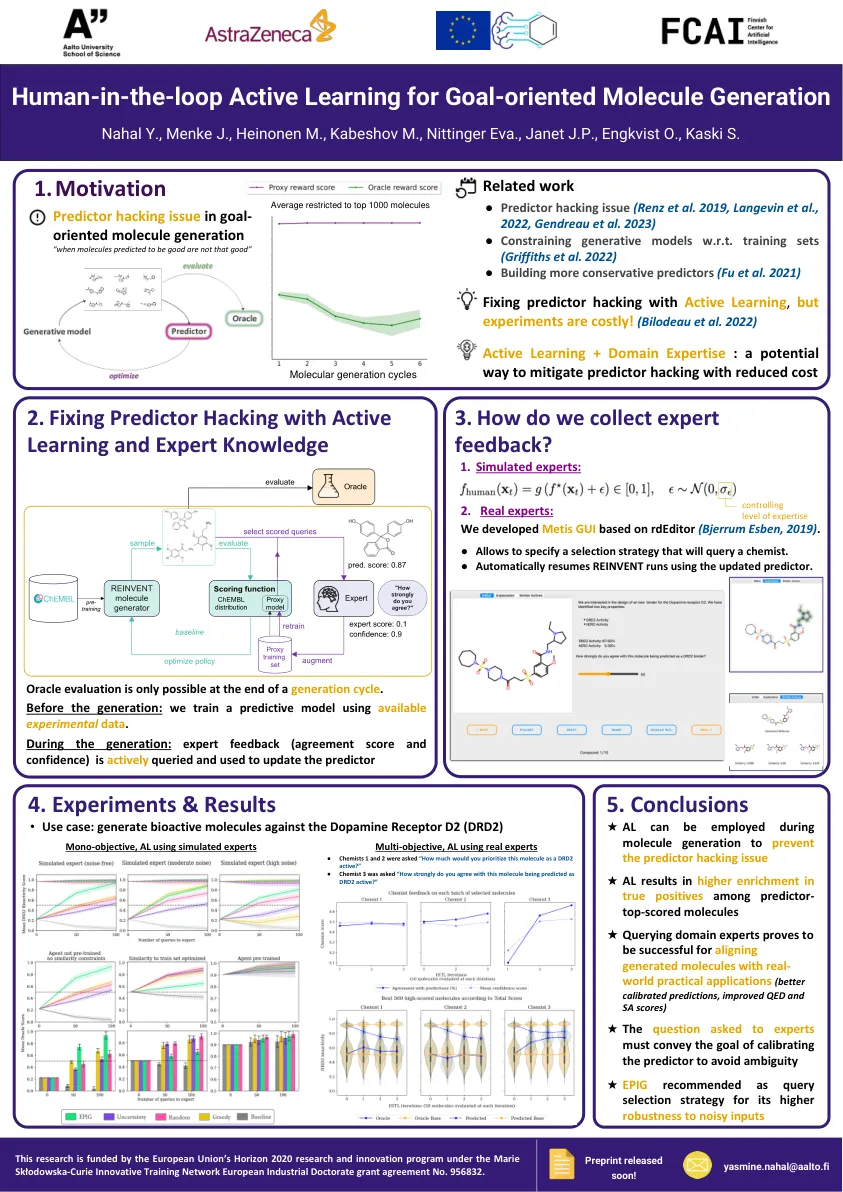
针对目标的分子生成的人类在循环中的主动学习
Oracle评估只有在一代周期结束时才能进行。生成之前:我们使用可用的实验数据训练一个预测模型。一代:专家反馈(协议得分和置信度)被积极查询,并用于更新预测指标

推荐引用推荐引用 Cohen, Kelly;Bokati, Laxman;Ceberio, Martine;Kosheleva, Olga;以及 Kreinovich, Vladik,“为什么可解释人工智能中使用模糊技术?可解释人工智能中使用哪些模糊技术?” (2021)。部门技术报告 (CS)。1553。https://scholarworks.utep.edu/cs_techrep/1553
我们对个体表现感兴趣的情况。在我们对个体表现感兴趣的情况下,我们希望将失败概率降至最低,我们希望物体与期望轨迹的偏差尽可能小——因为正是这种偏差导致了失败。模糊控制中出现这种偏差的可能原因之一是模糊控制基于使用“与”和“或”运算结合原始专家的置信度,而原始估计仅提供一些不确定性。就像专家无法提供所需控制的确切值一样——这就是为什么首先需要模糊技术——专家也无法用确切的数字来描述他/她对某个陈述的置信度。如果我们强迫专家这样做——许多系统都是这样做的——当再次询问相同的陈述时,专家会提供略有不同的数字。这些变化会影响“与”和“或”运算的结果——从而影响最终的控制。与所需控制的任何过大偏差都可能是灾难性的。因此,为了安全起见,我们要确保最坏的偏差尽可能小。让我们用精确的术语描述这种情况。设 δ > 0 表示专家提供程度的准确度。这意味着同一位专家可以对同一句话 A 的置信度提供估计值 a 和 a ′,它们是 δ 接近的,即 | a − a ′ | ≤ δ 。类似地,对于另一个语句 B ,专家可以提供估计值 b 和 b ′,使得 | b − b ′ | ≤ δ 。由于这种不确定性,我们可以得到不同的值 f & ( a , b ) 和 f & ( a ′ , b ′ ),即我们有一个非零差值 | f & ( a , b ) − f & ( a ′ , b ′ ) |。最坏的情况是这种差异最大。它的特点是价值

神经形态硬件的在线测试
摘要 — 我们提出了一种用于支持脉冲神经网络的神经形态硬件的在线测试方法。测试旨在实时检测由于硬件级故障而导致的异常操作,以及筛选容易出现错误预测的异常值或角落输入。测试由两个片上分类器实现,它们基于使用脉冲计数提取的低维特征集预测网络是否会做出正确的预测。分类器系统能够评估决策的置信度,当置信度被判断为低时,重放操作有助于解决歧义。通过将测试方法完全嵌入到基于 FPGA 的定制神经形态硬件平台中,可以演示测试方法。它在后台运行,完全不干扰网络操作,同时为绝大多数推理提供零延迟测试决策。索引术语 — 神经形态计算、脉冲神经网络、测试、可靠性。
人工智能保障和人工智能安全
Matt Fredrikson、Somesh Jha 和 Thomas Ristenpart,《利用置信度信息的模型反转攻击和基本对策》,载于第 22 届 ACM SIGSAC 计算机和通信安全会议论文集(ACM,2015 年),1322–1333 页。
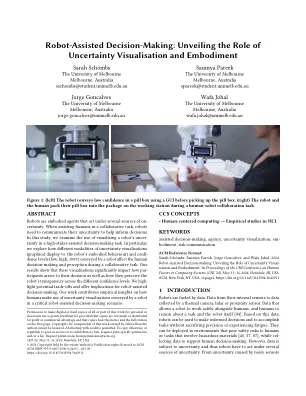
机器人辅助决策:揭示不确定性可视化和具体化的作用
机器人是具有具体行为能力的智能体,会在多种不确定性因素下行动。在协助人类完成协作任务时,机器人需要传达它们的不确定性以帮助做出决策。在本研究中,我们研究了在高风险辅助决策任务中可视化机器人不确定性的使用情况。具体来说,我们探讨了机器人传达的不同不确定性可视化形式(图形显示与机器人的具体行为)和置信度水平(低、高、100%)如何影响人类在协作任务中的决策和感知。结果表明,这些可视化显著影响了参与者如何做出决策,以及他们如何看待机器人在不同置信度水平下的透明度。我们强调了潜在的权衡,并为机器人辅助决策提供了启示。我们的工作为人类如何在关键的机器人辅助决策场景中利用机器人传达的不确定性可视化提供了实证见解。