XiaoMi-AI文件搜索系统
World File Search System航行器
BAA 呼叫 N0001424SBC03 - 修订 0002
I. 简介 本公告描述了海洋工程和海洋系统技术领域,名为“无人水下航行器动力和推进系统”,属于 N0001424SB001,是海军和海军陆战队科学技术 FY24 长期广泛机构公告,可在 https://www.nre.navy.mil/work-with-us/funding- Opportunities/announcements 找到。提案的提交、评估以及研究补助金和合同的发放将按照上述长期广泛机构公告中所述进行。本公告的目的是引起科学界的关注:(1) 将研究的领域,(2) 计划于 2024 年 3 月 4 日举行的行业日,以便对这个领域感兴趣的人进行对话,以及 (3) 提交白皮书和完整提案的计划时间表。 II. 主题描述 提议的主题将探索和利用缺乏能够在长距离内有效以各种速度工作的水下推进系统。具体而言,这项工作对能够在低速和高速之间转换的推进系统感兴趣,包括随时停止和重新启动的能力。其他期望的特性将在活动中简要介绍。该计划将寻求支持开发和演示能够以所列方式推进水下航行器的系统的技术和系统。工业日将提供进一步的任务概况细节。背景:部署的无人水下系统在执行任务时需要越来越高的耐力和机动性。Echidna 创新海军原型 (INP) 计划有几条努力方向,其中一条侧重于动力和推进。另一条侧重于材料科学,因此未来的参与者还应考虑材料对拟议工作的重要性。ONR 正在寻找创新的设计和概念,以通过能量收集、存储和管理以及有效利用可用功率来实现极长时间的任务。目标:海军研究办公室 (ONR) 希望收到有关使水下推进系统能够在较大速度范围内工作以及具有停止/启动功能的技术提案。这需要新型架构、电力系统、燃料和推进器设计。
BAA 呼叫 N0001424SBC03 - 修订 0001
I.简介 本公告描述了海洋工程和海洋系统技术领域,名为“无人水下航行器的动力和推进系统”,属于 N0001424SB001,FY24 海军和海军陆战队科学技术长期广泛机构公告,可在 https://www.nre.navy.mil/work-with-us/funding- Opportunities/announcements 找到。提案的提交、提案的评估以及研究补助金和合同的发放将按照上述长期广泛机构公告中所述进行。本公告的目的是引起科学界的关注 (1) 待研究领域、(2) 定于 2024 年 3 月 4 日举行的行业日,供对此领域感兴趣的人进行对话,以及 (3) 提交白皮书和完整提案的计划时间表。II.主题描述 提议的主题将探索和利用缺乏能够在长距离内以各种速度有效工作的水下推进系统。特别是,这项工作对能够在低速和高速之间转换的推进系统感兴趣,包括随时停止和重新启动的能力。其他所需特性将在活动中简要介绍。该计划将寻求支持以所列方式推进水下航行器的系统的开发和演示的技术和系统。将在行业日提供进一步的任务概况详细信息。背景:部署的无人海底系统在执行任务时需要越来越高的耐力和机动性。Echidna 创新海军原型 (INP) 计划有几条工作线,其中一条侧重于动力和推进。另一条侧重于材料科学,因此未来的参与者还应考虑材料对拟议工作的重要性。ONR 正在寻找创新设计和概念,以通过能量收集、存储和管理以及有效利用可用功率来实现极长时间的任务。目标:海军研究办公室 (ONR) 有兴趣收到有关使水下推进系统能够在大速度范围内工作以及停止/启动功能的技术提案。这需要新型架构、电力系统、燃料和推进器设计。

海战领域 - 传统基金会
根据天体(通常是太阳、月亮或特定恒星)的位置来确定自己在地球表面的位置,这种技术需要依靠晴朗的天空和高精度的天文钟。天文导航是几个世纪以来水手必备的技能,现在海军认识到不能只依赖 GPS,因此天文导航再次被教授给年轻水手。另一种关键的 GPS 无法使用的导航方法是惯性导航,它通过测量船舶或其他平台在所有三个维度上的加速度来提供其速度和位置。曾经非常庞大且昂贵,目前的固态惯性导航装置正变得越来越小、越来越便宜,使其能够用于小型水面舰艇甚至无人水下航行器 (UUV)。


•AK• IFAC-NL 3/03
研讨会包括 39 篇论文和三次全体会议演讲。在第一次全体会议演讲:用于海洋探索的海洋机器人;理论挑战和实际问题中,Antonio Pascoal(葡萄牙高等技术学院)就理论与实践之间的相互作用、海洋机器人导航、制导和控制中的关键概念和挑战进行了精彩的图文并茂的阐述,重点是与海洋科学家的合作。Jas Singh(英国系统工程与评估)发表了第二次全体会议演讲,概述了英国国防部新的战场通道无人水下航行器项目。Laurie Linnet(英国 Fortkey Ltd.)发表了第三次全体会议演讲,涉及基于 UUV 的创新视觉信息检索技术。

研究文章 UUV自主决策方法...
针对无人水下航行器(UUV)作业环境中决策的复杂性和不确定性,本文提出了一种基于动态影响图(DID)和期望效用理论的自主决策方法。首先,建立了UUV态势感知威胁评估模型。据此,建立了UUV自主决策的DID模型。然后,基于UUV威胁评估结果,推断并预测决策节点中各决策方案的效用。随后,利用最大期望效用原则选择最优自主决策方案。最后,通过仿真验证了DID方法的有效性。与传统专家系统相比,DID系统表现出很强的适应性,并且在不确定条件下的动态决策问题中表现出更好的解决方案。

《人工智能对战略稳定和核风险的影响》,第三卷,《南亚观点》
AI 人工智能 ASAT 反卫星(武器) ATR 自动目标识别 BMD 弹道导弹防御 CAIR 印度人工智能与机器人中心 CCW 某些常规武器公约 CBM 建立信任措施 DRDO 印度国防研究与发展组织 FCAS 未来作战航空系统 ICBM 洲际弹道导弹 IHE 不敏感高爆炸弹 ISR 情报、监视和侦察 LAWS 致命自主武器系统 MEMS 微机电系统 nEM 纳米能材料 NC3 核指挥、控制和通信 N/MEMS 纳米和微机电系统 NRRC 美国核风险降低中心 R&D 研究与开发 SPD 巴基斯坦战略计划司 SRF 俄罗斯战略火箭部队 SSBN 核动力弹道导弹潜艇 UAV 无人驾驶飞行器 UN 联合国 UUV 无人水下航行器 WMD 大规模杀伤性武器
ALPS II – 自主拉格朗日平台和传感器
便携式设备是 2003 年第一次自主和拉格朗日平台和传感器 (ALPS) 会议的推动因素。这次会议是在 21 世纪初期举行的,当时有几种关于如何观察海洋的相互竞争的想法。当时的观测资源相对丰富,而且在千禧年左右进行了许多规划演习。21 世纪初期已经取得了许多成功,全球漂流者计划和 Argo 剖面浮标阵列正在进行中。水下滑翔机刚刚开始用于科学而不是工程测试。螺旋桨驱动的自主水下航行器 (AUV) 开始得到广泛使用。小型化趋势导致传感器可用于广泛的物理和生物地球化学变量。无论是有意还是无意,ALPS 会议预示着自主观测的快速增长,这从根本上改变了观测海洋学。
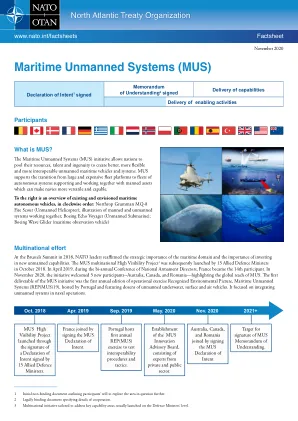
海上无人系统 (MUS)
在 2018 年布鲁塞尔峰会上,北约领导人重申了海洋领域的战略重要性以及投资新无人能力的重要性。随后,13 个盟国国防部长于 2018 年 10 月启动了 MUS 多国高能见度项目 3。2019 年 4 月,在两年一次的国家军备总监会议上,法国成为第 14 个参与者。2020 年 11 月,该计划迎来了 3 个新参与者——澳大利亚、加拿大和罗马尼亚——突显了 MUS 的全球影响力。MUS 计划的第一个成果是第一届年度作战演习“公认环境图、海上无人系统”(REP(MUS)19),由葡萄牙主办,有数十艘无人水下、水面和空中航行器参加。其重点是将无人系统整合到海军行动中。
BAA 呼叫 N0001424SBC03 - 修订 0003
I. 简介 本公告描述了海洋工程和海洋系统技术领域,名为“无人水下航行器动力和推进系统”,属于 N0001424SB001,是海军和海军陆战队科学技术 FY24 长期广泛机构公告,可在 https://www.nre.navy.mil/work-with-us/funding- Opportunities/announcements 找到。提案的提交、评估以及研究补助金和合同的发放将按照上述长期广泛机构公告中所述进行。本公告的目的是引起科学界的关注:(1) 将研究的领域,(2) 计划于 2024 年 3 月 4 日举行的行业日,以便对这个领域感兴趣的人进行对话,以及 (3) 提交白皮书和完整提案的计划时间表。 II. 主题描述 提议的主题将探索和利用缺乏能够在长距离内有效以各种速度工作的水下推进系统。具体而言,这项工作对能够在低速和高速之间转换的推进系统感兴趣,包括随时停止和重新启动的能力。其他期望的特性将在活动中简要介绍。该计划将寻求支持开发和演示能够以所列方式推进水下航行器的系统的技术和系统。工业日将提供进一步的任务概况细节。背景:部署的无人水下系统在执行任务时需要越来越高的耐力和机动性。Echidna 创新海军原型 (INP) 计划有几条努力方向,其中一条侧重于动力和推进。另一条侧重于材料科学,因此未来的参与者还应考虑材料对拟议工作的重要性。ONR 正在寻找创新的设计和概念,以通过能量收集、存储和管理以及有效利用可用功率来实现极长时间的任务。目标:海军研究办公室 (ONR) 希望收到有关使水下推进系统能够在较大速度范围内工作以及具有停止/启动功能的技术提案。这需要新型架构、电力系统、燃料和推进器设计。