机构名称:
¥ 1.0
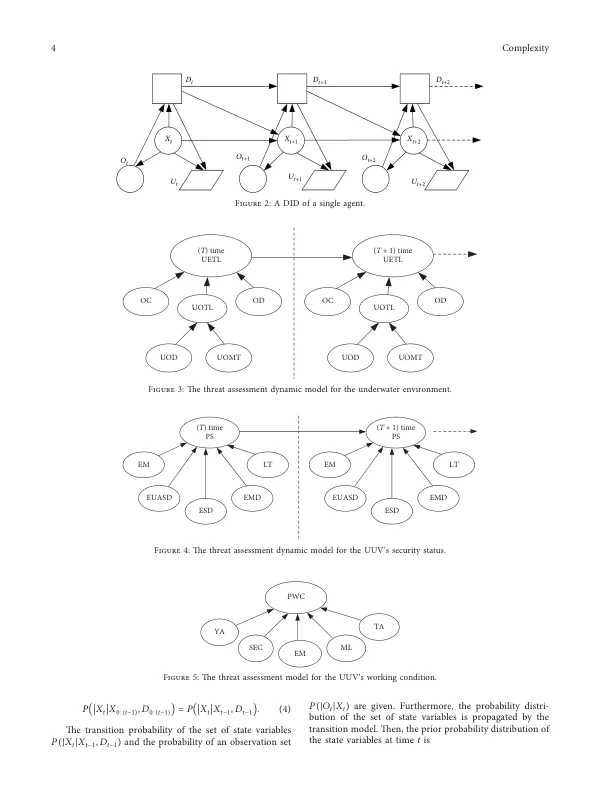
针对无人水下航行器(UUV)作业环境中决策的复杂性和不确定性,本文提出了一种基于动态影响图(DID)和期望效用理论的自主决策方法。首先,建立了UUV态势感知威胁评估模型。据此,建立了UUV自主决策的DID模型。然后,基于UUV威胁评估结果,推断并预测决策节点中各决策方案的效用。随后,利用最大期望效用原则选择最优自主决策方案。最后,通过仿真验证了DID方法的有效性。与传统专家系统相比,DID系统表现出很强的适应性,并且在不确定条件下的动态决策问题中表现出更好的解决方案。
研究文章 UUV自主决策方法...
主要关键词


相关文件推荐