机构名称:
¥ 1.0
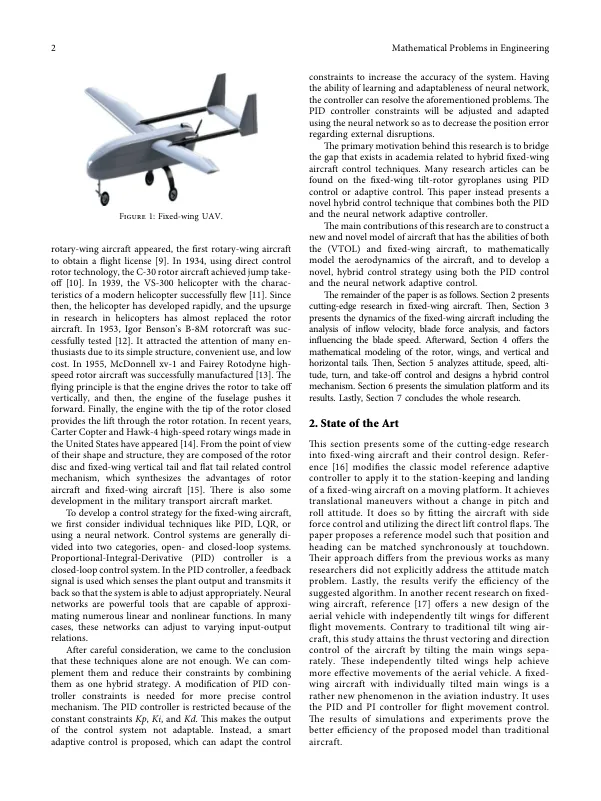
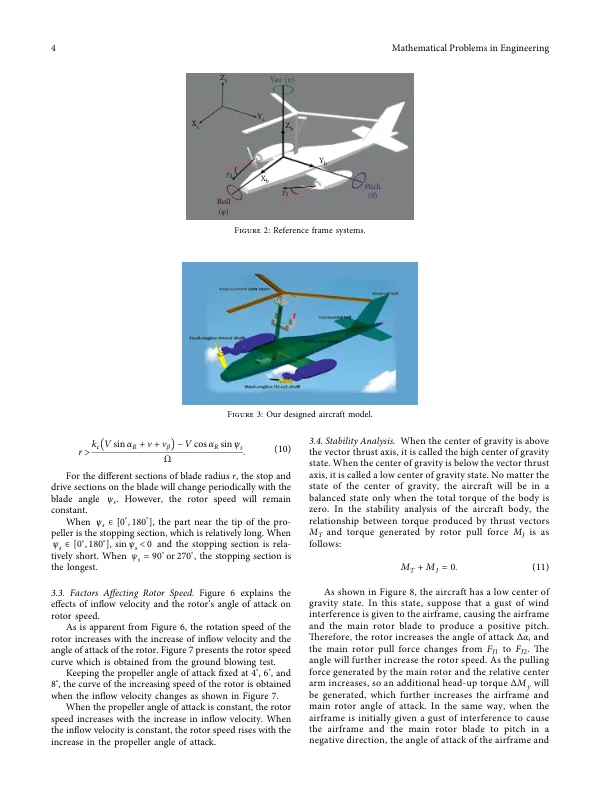
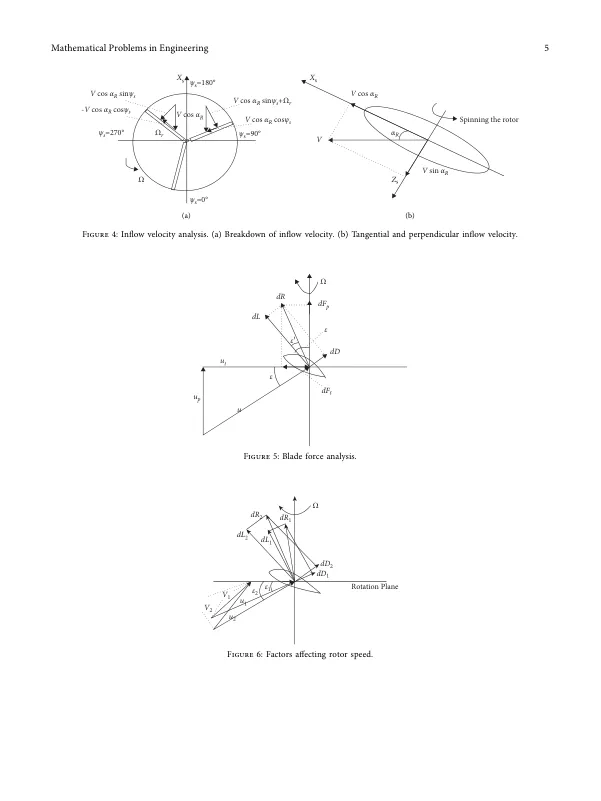
本文的目的是开发一种既具有垂直起飞 (VTOL) 能力又具有固定翼飞机能力的固定翼飞机。为了实现这一目标,开发了一种带有两个螺旋桨的固定翼旋翼机原型,其旋翼可以像无人机一样机动,同时还具有类似直升机的垂直起降能力。这项研究为旋翼机提供了制导、导航和控制算法。首先,本研究描述了固定翼飞机的动力学及其控制输入,即油门、桨叶螺距和推力矢量。其次,分析了来流速度、作用在旋翼叶片上的力以及影响旋翼速度的因素。然后,给出了旋翼、双引擎、机翼以及垂直和水平尾翼的数学模型。随后,设计了使用全球处理系统 (GPS) 模块的飞行控制策略。检查的参数包括姿态、速度、高度、转弯和起飞控制。最后,基于硬件在环 (HWIL) 的仿真证明了导航制导和控制机制的有效性和稳健性。仿真证实,所提出的新机制是稳健的,并满足任务要求。旋翼机在整个飞行过程中保持稳定,并有效地操纵指定路径。
研究文章固定的指导、导航和控制...
主要关键词


相关文件推荐