机构名称:
¥ 1.0
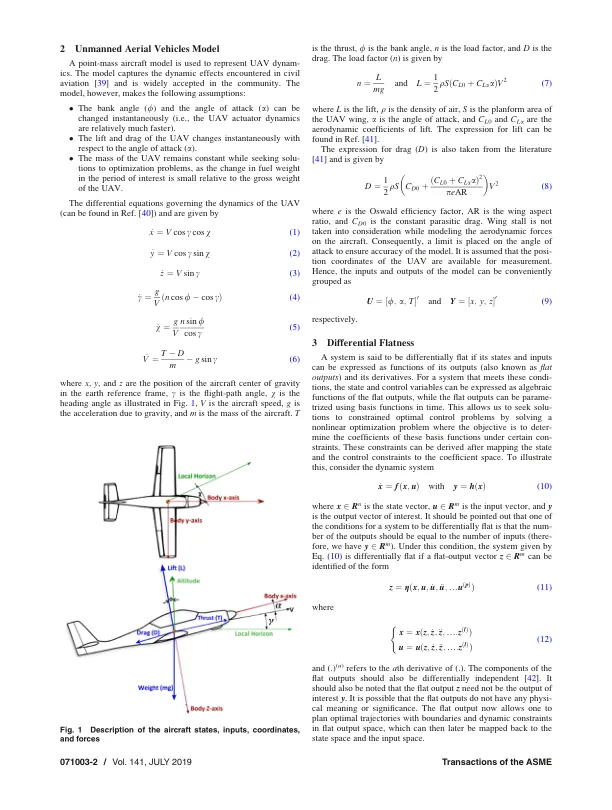
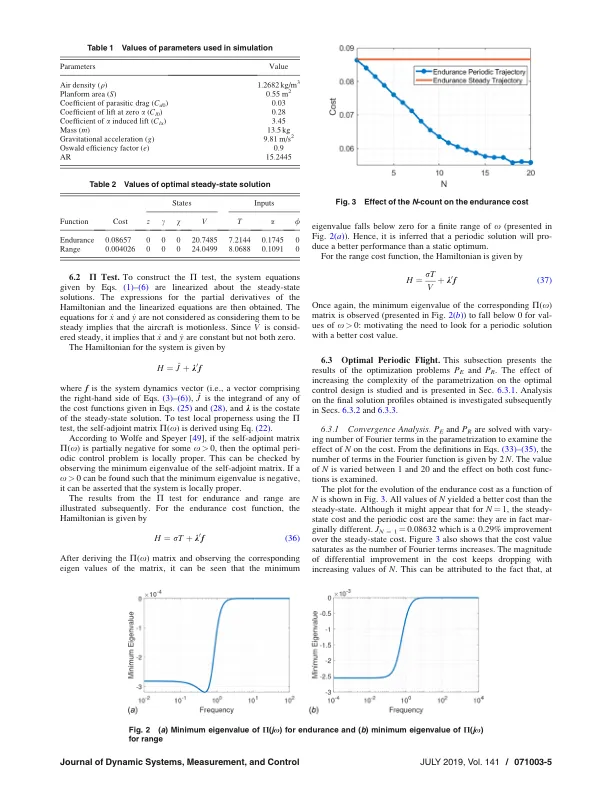
如今,无人机 (UAV) 的飞行距离越来越长,任务时间也显著延长。这要求无人机不仅要有长续航能力,还要有远程能力。受鸟类和海洋动物运动模式的启发,它们表现出动力-滑行-动力周期性运动行为,因此提出了一个最优控制问题来研究无人机轨迹规划。微分平坦度的概念用于将最优控制问题重新表述为非线性规划问题,其中平坦输出使用傅里叶级数参数化。P 检验还用于验证是否存在优于稳态运动的周期解。以航空探空仪无人机为例,说明周期性控制方案相对于平衡飞行在续航时间和航程成本方面的改进。[DOI: 10.1115/1.4043114]
基于... 的无人机周期控制
主要关键词



相关文件推荐