机构名称:
¥ 1.0
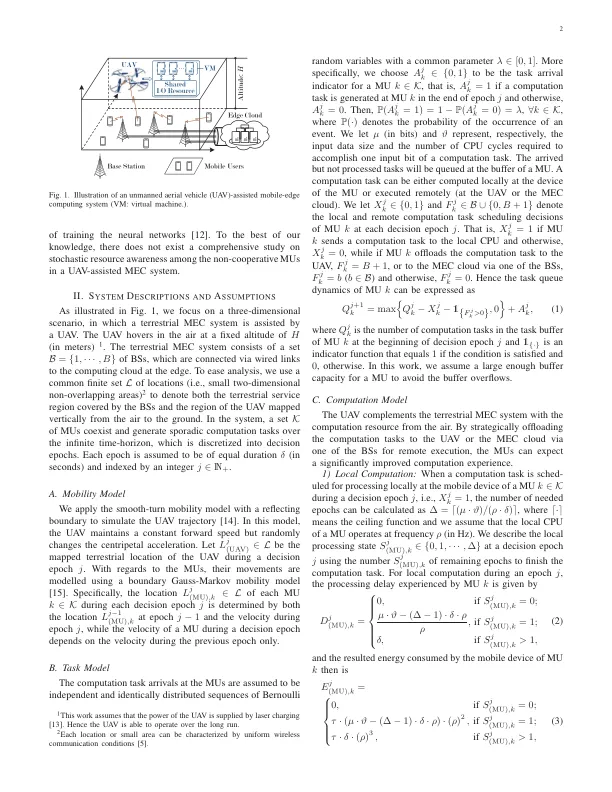
摘要 — 本文研究了一种无人机 (UAV) 辅助移动边缘计算 (MEC) 系统,其中 UAV 为地面 MEC 系统提供补充计算资源。UAV 通过创建相应的虚拟机来处理从移动用户 (MU) 接收的计算任务。由于 MEC 系统中 UAV 的共享 I/O 资源有限,每个 MU 都会在决策时期内竞争安排本地和远程任务计算,旨在最大化预期的长期计算性能。MU 之间的非合作交互被建模为随机博弈,其中 MU 的决策取决于全局状态统计数据,并且所有 MU 的任务调度策略是耦合的。为了近似纳什均衡解,我们提出了一种基于长短期记忆和深度强化学习 (DRL) 技术的主动方案。建立 MEC 系统的数字孪生,以离线训练主动 DRL 方案。使用所提出的方案,每个 MU 仅使用自己的信息进行任务调度决策。数值实验表明,该方案在决策时期内每个 MU 的平均效用方面具有显着的性能提升。
无人机辅助导航中的资源感知...
主要关键词



相关文件推荐