机构名称:
¥ 1.0
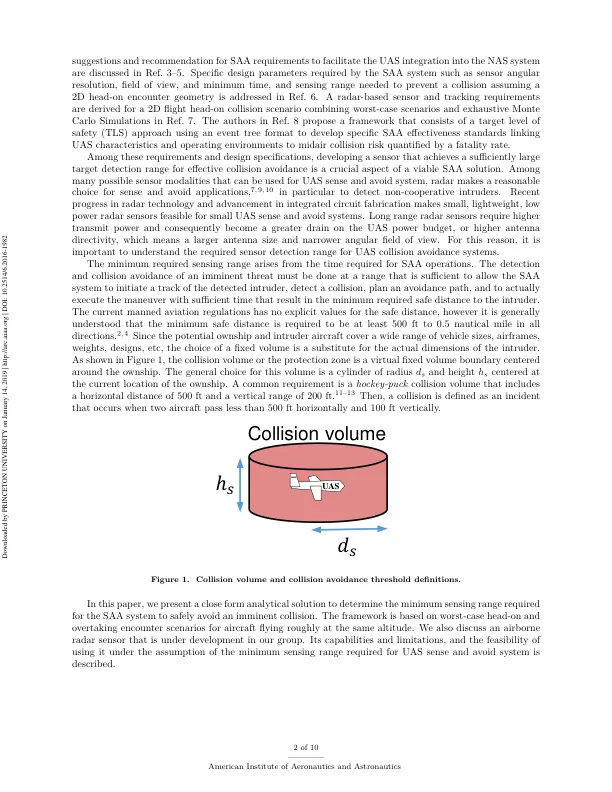
开发有效的感知和避让系统是无人机系统 (UAS) 在国家空域运行的关键挑战。一个关键问题是利用适用于 UAS 的轻型、低成本传感器,在足够的范围内探测潜在目标,以降低碰撞概率。我们提出了一种基于最坏情况碰撞遭遇几何形状设计最小所需感知范围的闭式分析方法。使用 500 英尺的最小安全距离和几种不同飞机的已知速度,使用松弛参数 δ r = 0 . 0354 ,发现这个最小所需感知范围约为 1.861 公里。我们通过描述实现所需最小感知范围的雷达传感器原型来证明这是一个可行的结果。
UAS 感知和避免所需的最小感知范围...
主要关键词



相关文件推荐