XiaoMi-AI文件搜索系统
World File Search System舵角

CM-580角冰制冰机
电话( 02 )2553-1555 网址www.freser.com 客服专线0800-586-586 电邮info@freser.com.tw 老日光冷冻工业股份有限公司FRESER INTERNATIONAL CORP.

CM-680角冰制冰机
电话 ( 02 )2553-1555 网址 www.freser.com 客服专线 0800-586-586 电邮 info@freser.com.tw 老日光冷冻工业股份有限公司 FRESER INTERNATIONAL CORP.

漂移角理论应用于船舶操纵模型。
船舶的六个自由度 ................................................ ..船舶轴线相对于 Eanh 轴线的相对位置 .................................. .涌浪力与涌浪速度之间的图形关系 阻力曲线的图形表示 ................................ .螺旋操纵的图形表示 ................................ ..舵角和角速度图的绘制:(A)动态稳定船舶 ............................................................. ..舵角和角速度图的绘制:(B)动态不稳定船舶 ............................................................. .. GZ 曲线的图形表示:(A)静态稳定船舶 ............................................................. .GZ 曲线的图形表示:(B)静态不稳定船舶 ................................................................ .. 推力曲线的图形表示 ................................................ ..动态稳定船舶的 Kemf Zig zag 机动 动态不稳定船舶的 Kemf Zig zag 机动 ............................................................................................................. .阻力曲线的图形说明 ............................................................................. .比例模型阻力曲线的图形表示 .. .. 纵向拖曳时舵处于攻角的模型方向 ............................................................................. ..显示测量的偏航力矩和舵角的图表 ............................................................................................. .显示测量的摇摆力和舵角的图表 ...... .比例模型阻力曲线图 ................................ ..攻角模型方位图:(A)舵与模型中心线对齐 ........................ .攻角模型方位图:(B)舵与拖曳水池中心线对齐 ........................ .. JL/测量比例模型图示:偏航力矩与摇摆速度图 ........................ .测量比例模型图示:摇摆力与摇摆速度图 ................................ ..平面运动机构图示 ................................ .船首和船尾之间相位差为零的模型轨迹 ............................................................................................. .PM M 下模型的正弦路径...................................... ..模型的旋转臂运动................................................ ..显示测量的摇摆力与角速度的关系的图表............................................................................................. .显示测量的偏航力矩与角速度的关系的图表............................................................................................. ..

参考指南 - 端口通信与量子舵
本文档中提到的版权和商标规格如有更改,恕不另行通知。所有内容,包括量子网络徽标,都是Zen Exim Pvt的属性。Ltd.本文档中提到的其他品牌或产品可能是其各自所有者的商标或注册商标。严格禁止使用,以任何形式或任何方式使用,翻译或传输本文档的内容,而没有获得Zen Exim Pvt的事先书面许可。ltd.

基于DNA条形码技术的徐闻角尾海域夏、秋季仔稚鱼鉴定研究
收稿日期 : 2023-05-22 基金项目 : 广东省大学生创新创业训练计划项目 (S202010566005); 国家自然科学基金青年基金 (31702347) 作者简介 : 王思进 (2000—), 男 , 本科生 , 主要从事渔业资源生物学研究 。 E-mail:1362882982@qq. com 通信作者 : 侯 刚 (1982—), 男 , 副教授 , 博士 , 主要从事南海鱼类早期资源研究 。

超轻型飞机 CS-VLA 认证规范
(3) 在任何起落架和襟翼位置,以 1·2 V S1 的直线、稳定滑行,以及在功率条件达到最大连续功率的 50% 时,副翼和方向舵控制运动和力必须随着滑行角增加到适合飞机类型的最大值而稳定增加(但不一定按恒定比例增加)。在较大的滑行角下,直到使用全舵或副翼控制或获得 JAR-VLA 143 中包含的控制力极限的角度,方向舵踏板力不得反转。滑行必须伴随足够的倾斜度以保持恒定的航向。快速进入最大滑行或从最大滑行恢复不得导致无法控制的飞行特性。

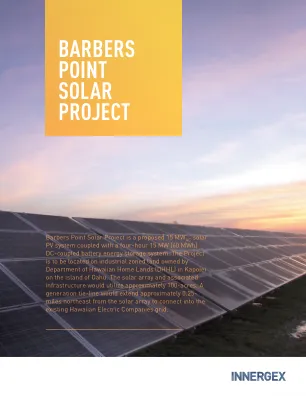
Verde角的海上经济部门
胚胎海鲈的发育和旋风培养;孵化的Artemia囊肿;鲭鱼(Decapterus macarelus)和Chicharro(Selar crumenophthalmus)的肥大,在1997年通过中国合作,在1997年为Tuna Fleet提供了活诱饵,其中引入了5种双壳类物种,其中2种物种在Martulture条件下进行了调整和复制。fao TCP用于Verde角,旨在支持水产养殖的发展。已经要求一个新项目向粮农组织(并接受),以有效地在Verde Cape