XiaoMi-AI文件搜索系统
World File Search System视线
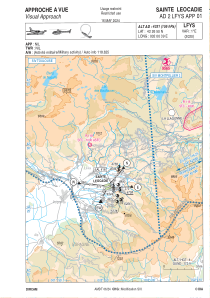
视线接近 视觉接近 SAINTE LEOCADIE AD ...
私人飞机 / 特殊说明 AD 运行条件 AD 参考代码 (ICAO) : 1A AD 保留给政府 ACFT、本土 CIV ACFT 和基于 AD La Llagonne La Quillane 的 ACFT AD 可用于其他 ACFT,条件是: 机长应: - 持有“山地”执照, - 或持有有效的“Sainte-Léocadie”执照(飞行手册上注明) 此外,如果 ACFT 不是本土或基于 AD La Llagonne La Quillane,机长应从山地飞行中心指挥官处获得 LDG 授权 山地飞行中心 (CVM) 提供的 LDG 授权 ACFT MIL: PPR 用于 LDG 到 OPS、PN 24 HR AD 禁止用于未配备无线电的 ACFT AD 禁止用于非多轴超轻型飞机 AD 禁止用于滑翔机(飞行安全除外) AD 禁止用于超轻型滑翔机 FATO / TLOF不符合规定,严格为政府保留 ACFT 空中航行危险 ACB 道路突出障碍物限制表面 1,40 米 可能有农业机械 W THR 07 程序和特殊说明 由于 RWY 斜坡,最好使用 LDG RWY 07 和 TKOF RWY 25 避免“触地复飞”RWY 07 在 CVM 活动期间:周一至周五 HEL 交通繁忙 军事训练区受以下几点限制: 1 - 42°37'00''N - 001°43'00''E 2 - 42°40'00''N - 001°47'00''E 3 - 42°40'00''N - 002°08'00''E 4 - 42°33'00''N - 002°16'00''E 5 - 42°25'00''N - 002°18'00''E 6- 从 5 号点和 1 号点开始的法国-西班牙和安道尔边境 ACFT 飞行在此区域监控频率 130.000 进出交通线路的飞机必须通过 W、SW、E 和 N 点在 5600 英尺 AMSL 处飞行 在机场以南 5300 英尺 AMSL 处必须使用交通线路(禁止飞越利维亚)

新型智能窗户材料可阻挡光线而不阻挡视线
https://www.jioforme.com/new-smart-window-material-can-block-rays-without-blocking-the-view/909893/ 1/4
Theia:混合现实耳机的视线驱动和感知感知的体积内容
在保持满意度的视觉质量的同时最大程度地减少带宽消耗,成为体积内容交付的圣杯。但是,由于要流的3D数据,严格的延迟需求以及高计算工作量,实现这一雄心勃勃的目标对于移动混合现实现实耳机可能充满挑战,这可以自然地使观众的动作具有六个自由度,但计算能力有限。以我们对50多名参与者的眼动作的批判性观察的激励,在本文中,我们提出了Theia,这是一种首要的视线驱动的和感知感知的感知式含量内容交付系统,有效地将以下创新纳入了整体系统中:(1)(1)实时创建FolumeTed网络数据的网络数据,以减少网络数据的真实创建; (2)效率增强动脉糊化内容以促进用户体验; (3)基于眼动的自适应省略外围含量以进一步节省带宽。我们使用Microsoft Hololens 2个耳机实现了Theia的原型,并广泛评估其性能。我们的结果表明,与最新技术相比,Theia可以将带宽的消耗量大幅减少高达67.0%,并将视觉质量提高高达92.5%。

用于自主视线导航的高精度星跟踪器算法的设计和仿真。⋆
深空立方体卫星正成为普通航天器的宝贵替代品。它们的开发可以标志着太空探索的新纪元,由于任务成本明显降低,为许多太空领域参与者拓宽了可能性。为了正确利用微型探测器,自主导航是必不可少的支柱。在此框架中,视线 (LoS) 导航是深空巡航期间状态估计的宝贵选择。视线导航是一种光学技术,基于对可见天体(例如行星)的观测,这些天体的星历表是众所周知的。这些天体的方向是通过机载光学仪器(照相机或星跟踪器)获得的,并在导航滤波器中将其与机载存储的星历表检索到的实际位置进行比较。在机载上执行完整估计程序的可能性使该技术成为自主深空立方体卫星的有效候选者。导航精度尤其取决于两个特性:观测几何和视线方向提取精度 [1]。第一个取决于任务场景,它定义了可见物体及其相对几何形状。第二个取决于成像硬件、图像处理算法以及任务几何形状。尽管可以稍微调整任务以在有利的观测几何窗口期间发生 [2],但通常它不够灵活,无法提高估计精度。因此,LoS 方向提取精度在整体导航性能中起着至关重要的作用。在此背景下,这项工作旨在正确生成合成星跟踪器图像,然后用于测试设计的 LoS 提取算法的性能。合成图像的生成取决于成像传感器和镜头的特性。对于星跟踪器,假设使用针孔相机模型。Hipparcos-2 目录用于检索可见恒星的方向,这些方向在传感器参考系中转换。恒星的视星等转换为传感器阵列上读取的光电子数量。此转换取决于传感器的特性(像素大小、填充因子、量子效率)、镜头直径和曝光时间。为了在恒星质心算法中达到亚像素精度,入射光被故意弄模糊,因此信息分散在不同的像素上。这是用高斯分布模拟的。行星的模拟不那么简单,因为形状和视星等都取决于观测几何。为了正确
航天器视线抖动管理和缓解经验教训以及工程最佳实践
• 技术出版物。已完成的研究或重要研究阶段的报告,介绍 NASA 项目的成果,包括大量数据或理论分析。包括被认为具有持续参考价值的重要科学和技术数据和信息的汇编。NASA 同行评审的正式专业论文的对应文件,但对手稿长度和图形演示范围的限制不那么严格。• 技术备忘录。初步或具有专门意义的科学和技术发现,例如快速发布报告、工作文件和包含最少注释的参考书目。不包含广泛的分析。• 承包商报告。NASA 赞助的承包商和受资助者的科学和技术发现。

物理限制的深度偏置点扩散函数模型:朝向非视线成像重建
摘要。非线视线(NLOS)成像已成为一种突出的技术,用于从经历多种弥漫性反射的图像中重建遮盖的对象。这种成像方法由于其广泛的潜在应用而引起了各种领域的关注,包括遥感,救援操作和智能驾驶。然而,准确地对入射光方向进行建模,该方向携带能量并由检测器捕获,并在随机扩散反射方向中捕获,这构成了巨大的挑战。这一挑战阻碍了NLOS成像的精确前进和逆物理模型的获取,这对于实现高质量重建至关重要。在这项研究中,我们提出了一个使用随机角度跟踪的NLOS成像系统的点扩散函数(PSF)模型。此外,我们引入了一种重构方法,称为物理受限的反向网络(PCIN),该方法通过利用PSF约束和卷积神经网络的优化来建立准确的PSF模型和逆物理模型。PCIN方法在正向PSF模型的约束下随机初始化参数,从而消除了传统深入学习方法需要的广泛训练数据集的需求。通过交替的迭代和梯度下降算法,我们迭代优化了PSF模型和神经网络参数中的分散反射角。结果表明,PCIN不需要大量实际的地面数据组来实现有效的数据利用。此外,实验发现证实了所提出的方法可以高精度有效地恢复隐藏的对象特征。

批准的管辖决定
美国地质调查局地图。引用比例和四边形名称:跑道 10-28 视线项目申请旱地 AJD,“展览 1:跑道 10-28 视线 USGS 地形图”,日期为 2022 年 9 月 6 日。美国农业部自然资源保护局土壤调查。引用:跑道 10-28 视线项目申请旱地 AJD,“展览 2:跑道 10-28 视线土壤图”,日期为 2022 年 9 月 6 日。国家湿地清单地图。引用名称:跑道 10-28 视线项目申请旱地 AJD,“附件 4:跑道 10-28 视线国家湿地清单地图”,日期为 2022 年 9 月 6 日。州/地方湿地清单地图:跑道 10-28 视线项目申请旱地 AJD,“附件 5:跑道 10 28 视线佐治亚溪流和湿地”,日期为 2022 年 9 月 6 日 FEMA/FIRM 地图:跑道 10-28 视线项目申请旱地 AJD,“附件 6:跑道 10-28 视线 FEMA 洪水灾害地图”,日期为 2022 年 9 月 6 日。100 年洪泛区海拔为:单击此处输入文本。(1929 年国家大地测量垂直基准)照片:

摘要书 - DDI2022
摘要:驾驶员注意力通常通过扫视行为来评估,通常是通过测量远离前方道路的扫视或直接测量对非驾驶相关目标的扫视。这种方法可用于检测分散注意力的事件,但它不会检查是否对所有与情境相关的目标进行了采样。在这里,我们评估了 MiRA 理论作为注意力评估基础的实用性。对 23 名驾驶装有仪器的车辆在城市路线上行驶的参与者进行了实地研究。参与者佩戴头戴式眼动仪。数据缩减包括识别需要采样的目标区域、是否对其进行采样以及是否存在相关或不相关的其他交通。此外,逐个凝视分析确定了凝视方向、目的和目标。正如预测的那样,驾驶员对所有需要将视线从前方移开的目标区域进行了采样。大致在前方的目标区域(如斑马线)可能是通过周边视觉进行采样的,但这无法通过所使用的设备可靠地确认。 发现视线方向分布与先验定义的要求非常吻合。并行要求数量越多,用于检查交通情况的视线份额就越大。相关交通比不相关交通受到更多的监控。并行要求数量越多,备用视觉容量就越少。名义上的视线目标识别与要求的联系较少。因此,我们建议“传统的”基于视线的注意力评估应与基于目的的视线评估协议以及与情况相关的预定义要求相结合。