XiaoMi-AI文件搜索系统
World File Search System计算环境

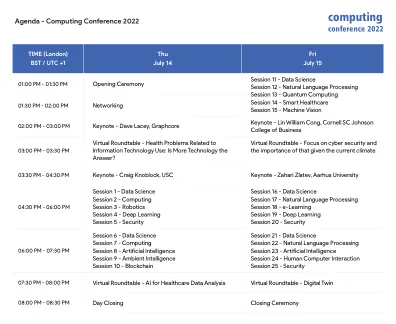
高性能计算和量子计算
10:20 – 10:30 艾米利亚-罗马涅大区博洛尼亚科技城 10:30 – 10:45 Sanzio Bassini – CINECA 欢迎辞 10:45 – 11:30 Ivano Tavernelli – IBM Quantum 主题演讲 – 实用时代的量子计算 11:30 – 11:50 Daniele Ottaviani – CINECA 量子计算实验室更新 第 1 场:CINECA 量子计算合作伙伴 – 主席:Daniele Ottaviani 11:50 – 12:15 Hermanni Heimonen – IQM IQM Radiance – 用于 HPC 中心的量子计算机 12:15 – 12:40 Vincent Martin – Pasqal 介绍 Pasqal 量子计算机:从中性原子到用例 12:40 – 13:05 Axel Daian – 用于实际应用的 D-Wave 量子计算 13:05 – 15:00 午餐 + 科技城之旅 第二场:意大利制造的 QC I – 主席:Sara Marzella 15:00 – 15:25 Giacomo Cappellini – Eniquantic Eniquantic:Eni 迈向量子计算未来的新尝试 15:25 – 15:50 Francesco Tafuri – 那不勒斯费德里科二世大学 量子计算机的超导硬件:物理学、实现、操作和前景 15:50 – 16:15 Simone Cialdi – 米兰大学 TQ4C - 环路架构光子量子计算机 16:15 – 16:35 咖啡休息 第三场:意大利制造的 QC II – 主席:Anita Camillini 16:35 – 17:00 Roberto Osellame – Ephos Inc./CNR 集成量子光子处理器,通向光子量子计算机的道路 17:00 – 17:25 Fabio Sciarrino – 罗马大学“Sapienza”量子计算光子学平台:硬件和应用 17:25 – 17:50 Roberto Siagri – Rotonium 边缘中心量子计算:下一个前沿 17:50 – 18:15 Daniel Szombati – Planckian 全球驱动的超导量子计算架构

陆地巡检机器人关键技术及其在水产养殖中的应用前景
陆地巡检机器人在执行各种任务时,需要感知周围 环境、定位自身位置、识别目标对象等,这些功能的实 现都依赖于传感器为机器人提供与外部环境交互的 “ 感 知器官 ” 。传感器是陆地巡检机器人的重要组成部分, 能够感知周围环境并获取相关信息,帮助机器人感进行 自主导航、避障、监测、抓取等工作。曹现刚等 [ 13 ] 设计 一种固定柔性轨道式悬挂巡检机器人平台,以解决煤矿 井下特种巡检机器人在三维环境重建和非结构环境运动 轨迹规划等关键技术,利用轨道,降低轨道铺设,为煤 矿环境巡检提供新的特种巡检平台。张书亮等 [ 14 ] 研究了 室内移动机器人的定位问题,提出融合轮式里程计、惯 性测量单元 IMU(inertial measurement unit) 、超宽带 UWB(ultra wide band) 和激光雷达定位数据的方法,依次 对不同传感器的定位数据进行融合,提高室内移动机器 人的定位精度。梁莉娟等 [ 15 ] 建立场景环境坐标系,利用 传感器探测出障碍物信息,对探测到的障碍物进行定位, 制定激光近场探测传感器的动态避障行为。李琳等 [ 16 ] 提 出基于条纹式激光传感器的机器人焊缝跟踪系统,采用 机器人末端安装条纹激光传感器,通过小波变换模极大 值理论分析焊缝轮廓,确定焊缝特征点。王正家等 [ 17 ] 提 出一种基于多传感器的机器人夹取系统,融合机器人内 置传感器所测量的位置、速度和角度等信息,利用外置 传感器完成对目标物的自动识别与定位。 2.1.1 传感器的使用场景及应用分类



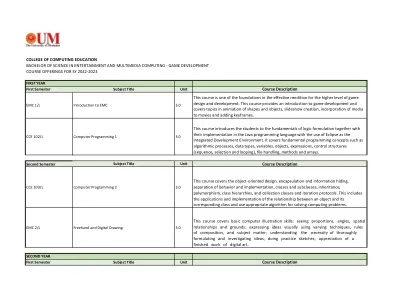
计算数学BS(计算...
CM-301 Calculus ( 3 + 0 ) Limits & Continuity: Limits, Continuity, Tangent lines & Rate of Change, Sequence and Series: Sequence and Their Divergence and Convergence Test, Introduction to Infinite Series, Taylor and Maclaurin Series, Convergence and Divergence Test for Series: Limit comparison test, Ratio test, Root test, Derivatives: Techniques of differentiation, Chain rule and implicit differentiation, derivatives逆函数,双曲线函数,逆三角和双曲线函数,分化的应用,最大值和最小值单个可变功能的功能,边际分析,边际分析以及使用不确定的形式和l'医院规则,整体构成:riemann积分,整合和整合的序列,差异和整合的序列,依次和整合三角学和双曲线功能,正弦,余弦,割线和切线的功能的整合,部分,三角替代,不当积分,beta和伽玛积分,差异方程,差分方程:微分方程,形成和解决方程,方程,方程,一阶,初始和边界价值,求解一级方程式或求解的各种方程式,确切的既方程式,既有方程式,又有等方程,并依次分离,既有等方程,又有等方程,并依次分离,且既有等方程,又依次,既有等方程式,又依次分离,及以上等方程式,且共同依次,既有方程性,又有方程性的范围。轨迹。非线性一阶方程,信封和单数解决方案
计算
中央处理器 计算机中的主要芯片是微处理器芯片,也称为 CPU(中央处理器)。CPU 安装在称为主板或母板的印刷电路板上。该芯片被视为计算机系统的控制芯片,因为它控制其他芯片以及连接到计算机的外部设备(如显示器和打印机)的活动。此外,它还可以执行逻辑和计算任务。 内存或存储单元 内存或存储单元用于在处理前后存储数据。存储容量以字节表示。 内存 此单元暂时保留结果直到进一步处理,例如随机存取存储器 (RAM)。此内存是易失性的,这意味着断电时数据会消失。 存储 存储或“二级存储”用于永久保留处理后的数字数据。例如硬盘。存储本质上是非易失性的。 输出单元 输出单元从 CPU 接收信息,然后以软处理或硬处理形式将其传送到外部存储器或设备。显示器或打印机是常见的输出设备。