XiaoMi-AI文件搜索系统
World File Search System设计验证
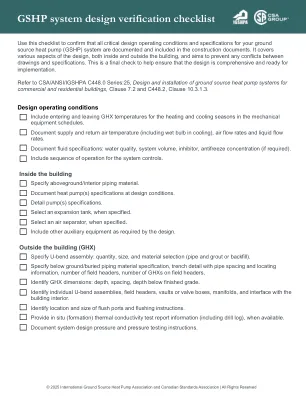
GSHP系统设计验证清单
使用此清单确认将所有关键的设计操作条件和地面源热泵(GSHP)系统的规格记录在施工文档中。它涵盖了建筑物内外设计的各个方面,旨在防止图纸和规格之间的任何冲突。这是一项最终检查,以帮助确保设计是全面的且准备实施的。

热性能设计验证 - NPL 出版物
本报告介绍了作为 DOE“技术合作伙伴计划”的一部分对八个玻璃窗系统进行的 V 值测量结果。测量的框架为 i) 隔热铝制框架;ii) 硬木框架;iii) UPVC 框架;iv) 高性能隔热双层窗。框架使用不同的充气双层玻璃单元进行测量,这些单元具有不同的气隙、低辐射涂层表面数量、间隔条系统和二级玻璃单元。测量是在 NFL 墙面防护热箱中进行的,使用 CEN 标准草案 prEN 12412-1 中规定的程序和传统的“直接”程序。NPL 报告 QMl15 中报告的两个玻璃校准板的热箱测量结果用于评估
2024年短期课程的年度日历 -
sarp-apddrl是一种用于新研究思想概念化的“一站式设施”,它设有材料开发的设施,可用于产品设计与开发以及过程和设计验证。SARP-APDDRL致力于阐明研究思想,以开发有关可持续聚合物的环保解决方案的新技术全球科学界。
压缩设计和验证 - 文化和数字工具
从正式启动项目到投入使用(EIS),飞机开发时间通常需要六到八年,即技术就绪水平(TRL)6 到 TRL 8 [2] ,其中 TRL 6 代表该技术被认为已通过设计验证,可以投入生产项目。随着实现零碳排放飞机所必需的革命性技术的引入,开发时间可能会更长。FlyZero 已将液氢确定为最有可能扩展到大型商用飞机的零碳排放燃料 [3] 。实现这些全新的飞机需要克服重大的技术挑战。
小册子电动汽车工程与开发
关键模块包括EV设计过程,监管标准和开发周期,强调实践技能和行业标准的工具。学生将深入了解动力总成配置,电池技术和燃料电池系统,同时学习管理安全性,设计验证和虚拟工程技术。特别关注不同的车辆类型,从两轮和三轮车到汽车,公共汽车和卡车。对于那些旨在提高其电动汽车工程专业知识并为可持续运输的未来做出贡献的人来说,这是理想的选择。

推荐引用 推荐引用 中佛罗里达大学模拟与训练研究所,“分布式交互式模拟、演习管理和反馈标准:草案”(1964 年)。模拟与训练研究所。174。https://stars.library.ucf.edu/istlibrary/174
5.1.1 用户 ...... .. .......... .. .. ............ .. .. .... .. ...... .. ...... .. ...... .. .. .... .. .... .. 6 5.1.2 模拟管理器 ...... .. .. .... .. .. .. .. ...... .......... .. .............. 6 5.1.4 模式提供商 .. .. ... .. .. .. .. .. ............................................... 6 5.1.5 站点管理器 ...... .. .... ...... ......................................................................... .... 7 5.1.6 DIS 控制 .. .... .... .... .... .... .... ... ... . ........ .... ...... ........ .. ........ .. ........ .. ..... .. ................ .. 7 5.1.7 网络管理器 ...... .. ........ .... ...... ...... .... .. .. .. .. ........ .. ....... 7 5.1.8 VV&A 管理局 .. .. ........ .. .. .. .. .. .. .. .. .............................................. .... .. .......... 7 5.2 DIS 演习发展过程模型... ...... .. .... .. .. .. .. .. ................ .. ........ ...... .... 7 5.2.1 计划演习 .... .. .. .. .. .. ...... .. .. .. .. .. .......... .. .. .......... .. .................... 8 5.2.2 设计、构建和测试演习 .... .. .. ............ .. ................ .. ........ ...... 8 5.2.3 实施演习 .................. .. .. .. .. .. .. .. .. ...... .. .. .. .. ............ .. ....... 9 5.2.4 开展演习后活动 .. .. ........ .. ................ ...... .. .. ...... .. .. ......... 10 5.2.5 向决策者提供结果 .. .. ............ .. .. .. ........ .... ................ .... 10 5.3 验证、确认和认证 .................. .. ............ .... .. ....... 10 5.3.1 第 1 阶段 • 合规标准验证 .. ............ .. ............ 12 5.3.2 第 2 阶段 · 架构设计验证 .. ............ .. ............................ .. ....... 12 5.3.3 第 3 阶段 • 概念验证 ................ .... .... .. .... .... ........................ .. .. ....... 12 5.3.4 第4 • 详细设计验证 ........ .. ......................... .. .. .. ................ 13 5.3.5 阶段 5·兼容性验证 .. .............. .. .. ................ .... ......... 13 5.3.6 阶段 6 • 演习验证 .. .. ...... .... .. ........................ .. ......... 13 5.3.7 阶段 7·认证 .. .. .. .. .... .. .. .. ...... .. .. ... .. .......... ........ ................ 14 5.4 练习设置、管理和反馈所需的功能 .... .... ........... 14 5.4.1 练习设置 ................. .... .... .. .......... .. .. .. .......... .. ........ .. ........ 14 5.4.1 .1 实例化会话 ................................. ........ .. ...... .. ...... .. ... .. ... 14 5.4.1.2 请求参数报告 .... ... .. ................... .. .. .................... 15 5.4.1.3 显示实体状态 .. .. .. ................................ .... .. .. .. .. 15 5.4. 1.4 显示网络健康 .. .. .. .. .. .. .. .. .......... .... .. ........ 15 5.4.2 练习管理.. .. .. .. .. .. .. .. .. .. .. .. .. 15 5.4.2.1 设置练习 .. .. .. .. .. .. .. .. .. .. 15 5.4.2.2 初始化会话 .. .. .. .. .. .. .. .. .......... 15 5.4. 2. 3 控制会话 .... .......... .. .. .. .............. .. .............................. 16 5.4.2.4 监控会话 ...... .... .. ........ .. ........ .... .. .......... .. ........ 17 5.4.3 练习反馈 ................ .. ................ .. .......... .... .. .............................. 18 5.4.3.1 数据 ................ .. .. ................ .. ...... .. .. ........................ .. .......... 18
标题:自动驾驶汽车传感器的协调计量
自动驾驶功能的虚拟和物理模拟是评估可能构成传感器设备、感知系统和控制算法设计验证计划性能的无数场景的唯一实用方法。传感器的计算机模型需要准确地表示其在所有相关情况下的行为,包括恶劣天气。驾驶场景的物理模拟应重现等效的环境条件,并能够以可重复的方式进行验证。因此,设计参考设施和测试程序以评估受控正常和不利条件下的传感器性能非常重要。此外,有必要定义感知极限(天气、照明)以评估 ADAS 传感器的优势。
对空军太空发射认证的评估...
The objective of this evaluation was to determine whether Air Force Space and Missile Systems Center (SMC) officials complied with the Air Force Launch Services New Entrant Certification Guide (NECG) when certifying the launch system designs for the National Security Space Launch (NSSL)‑class (formerly known as the Evolved Expendable Launch Vehicle‑class) SpaceX Falcon family of launch vehicles.1此外,在评估期间,我们扩大了目标,还确定了SMC官员是否将NECG中的设计验证方法应用于正在开发中的其他三个空间发射提供商的新参与者发射车:Northrop Grumman Innovation Systems,United PunchAunt Alliance和Blue Origin,LLC,LLC。在评估期间,这三个发布提供商的认证流程仍在进行中。

使用 X-Plane 进行 VTOL-UAV 飞行员训练的 HIL 飞行模拟器
摘要:随着垂直起降无人机(VTOL UAV)的日益普及,一个新的问题出现了:飞行员训练。大多数传统的飞行员训练模拟器都是为全尺寸飞机设计的,而大多数无人机模拟器仅专注于概念测试和设计验证。X-Plane飞行模拟器进行了扩展,包括复杂的风动力学、地面效应和准确的实时天气等新功能。商用HIL飞行控制器与VTOL垂直起降飞机无人机模型相结合,以提供逼真的飞行控制。在模拟中测试了一个真实的飞行案例场景,以显示包含精确的风模型的重要性。结果是一个完整的模拟环境,已成功部署用于FuVeX制造的Marvin飞机的飞行员训练。