XiaoMi-AI文件搜索系统
World File Search System起飞时间
操作概念描述更新 - RETINA
ADS-B 自动相关监视 – 广播式 AH 抽象层次结构 AOIS 航空运行信息系统 AR 增强现实 A-SMGCS 先进地面运动引导和控制系统 ATC 空中交通管制 ATCO 空中交通管制操作员 ATCR 空中交通管制雷达 ATM 空中交通管理 COO 协调员 CTOT 计算的起飞时间 CWP 管制员工作位置 DEL 交付 DTD 接地距离 EID 生态界面设计 EOBT 预计起飞时间 ER 探索性研究 ETOT 预计起飞时间 FDP 飞行数据处理 FOV 视场 GGV 注视、手势、语音 GND 地面 HDE 低头设备 HMD 头戴式显示器 ICAO 国际民用航空组织 IFR 仪表飞行规则 IHP 中间等待点 ILS 仪表着陆系统 IMC 仪表气象条件 JU 联合承诺 LOC 航向道 LVP 低能见度程序 OOT 离开塔台 PP 伪飞行员 PSR 主监视雷达雷达无线电探测和测距
作战概念描述更新 - RETINA
ADS-B 广播式自动相关监视 AH 抽象层次 AOIS 航空运行信息系统 AR 增强现实 A-SMGCS 先进地面移动引导和控制系统 ATC 空中交通管制 ATCO 空中交通管制操作员 ATCR 空中交通管制雷达 ATM 空中交通管理 COO 协调员 CTOT 计算的起飞时间 CWP 管制员工作位置 DEL 交付 DTD 接地距离 EID 生态界面设计 EOBT 预计起飞时间 ER 探索性研究 ETOT 预计起飞时间 FDP 飞行数据处理 FOV 视场 GGV 注视、手势、语音 GND 地面 HDE 低头设备 HMD 头戴式显示器 ICAO 国际民用航空组织 IFR 仪表飞行规则 IHP 中间等待点 ILS 仪表着陆系统 IMC 仪表气象条件 JU 联合承诺 LOC 航向道 LVP 低能见度程序 OOT 离开塔台 PP 伪飞行员 PSR 主监视 RADAR 雷达无线电探测与测距

大众 910/ 921 - Dr. Westerboer GmbH
6.1 VW921 存储器组织.............................................................. 70 6.1.1 记录存储.............................................................................. 70 6.1.2 统计数据存储.............................................................................. 72 6.1.3 飞行日志存储...................................................................... 74 6.1.3.1 航班号...................................................................... 74 6.1.3.2 航班日期...................................................................... 75 6.1.3.3 起飞时间...................................................................... 75 6.1.3.5 飞行时间...................................................................... 76 6.1.3.6 管理统计数据存储............................................................. 76 6.2 串行接口...................................................................................... 78 6.2.1 统计数据的打印........................................................................ 79 6.2.2 打印飞行日志........................................................................ 83 6.2.3 飞行过程中的数据输出格式飞行................................. 83
大众 910/ 921 - Dr. Westerboer GmbH
6.1 VW921 存储器组织...................................................................... 70 6.1.1 记录存储.............................................................................. 70 6.1.2 统计数据存储.............................................................................. 72 6.1.3 飞行日志存储...................................................................... 74 6.1.3.1 航班号...................................................................... 74 6.1.3.2 航班日期...................................................................... 75 6.1.3.3 起飞时间...................................................................... 75 6.1.3.5 飞行时间...................................................................... 76 6.1.3.6 管理统计数据存储............................................................. 76 6.2 串行接口...................................................................................... 78 6.2.1 打印统计数据............................................................................. 79 6.2.2 打印飞行日志............................................................................. 83 6.2.3 飞行过程中的数据输出格式............................................................. 83

机场协作决策 - 代尔夫特理工大学资料库
为了密切监控飞机的旅程,我们定义了 16 个里程碑。这些里程碑提供了一个通用定义,所有利益相关者都会遵循这个定义 [22]。A-CDM 中的一个关键里程碑是目标起飞时间 (TOBT)。TOBT 是飞机预计准备就绪的时间,所有舱门都关闭,登机桥都拆除。机场利益相关者使用 TOBT 来规划他们的活动。ATC 使用 TOBT 进行起飞前顺序规划系统,该系统确定飞机从跑道起飞的最佳顺序。周转协调员根据他掌握的周转过程(如餐饮、清洁、加油和乘客登机)的进度信息来更新 TOBT。然而,这些 TOBT 更新中的大部分发生在周转的最后 10 分钟内。这些最后一刻的更新会打乱机场利益相关者的日程安排,从而降低效率。

用于在 ODE 中在线发布的论文准备模板
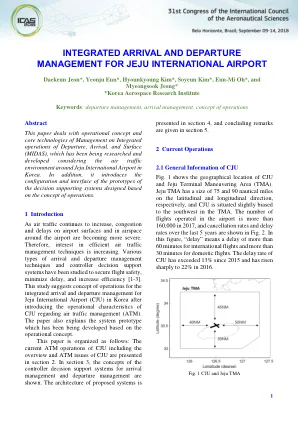
图3描述了CJU的机场地面配置。CJU有两条交叉跑道和40个停机位。总长度为3180m的07/25跑道通常用于起飞和到达,而长度为1900m的13/31跑道很少使用。在机坪区域,有两组平行的停机位,如图4所示。由于A组和B组的后推路线相互重叠,A组停机位上的飞机在收到管制员的指令后,无需后推程序即可立即开始滑行。CJU的一个主要特点是机坪区域周围存在瓶颈。由于滑行道有限且机坪区域狭窄,如果滑行道被后推或滑行的飞机占用,其他飞机应留在指定的停机位上。因此,起飞顺序几乎与机坪退出顺序相同,这不能反映在预定起飞时间前有足够时间的飞机的优先权。 CJU 在出发方面的问题之一是交通管理计划 (TMI)。TMI 是一种经常发布的出发限制,原因是

空中交通管理中的控制员策略评估...
空中交通管制 (ATC) 是地面提供的一项服务,用于控制受控空域内所有飞机的移动。根据该区域雷达系统的可用性,可以使用雷达控制或程序控制来实现。在马来西亚半岛,这些受控区域被称为吉隆坡飞行信息区 (KLFIR)。这些区域分为 6 个区,分配给不同的管制员团队。由于本研究旨在研究空中交通管制员 (ATCO) 在程序管制期间使用的策略,因此选择吉隆坡海洋区或吉隆坡 4 区作为参与管制空域。为了收集有关管制员策略的见解,吉隆坡空中交通管制中心 (KLATCC) 的参与者自愿参加静态冲突检测演习 (SCDE)。根据结果,最突出的问题是延误,这在空中交通管理中是不可避免的。但是,研究还发现,通过在预计起飞时间 (ETD) 之前预先规划交通,可以实现请求巡航高度 (FPL) 和指定巡航高度 (XFL) 之间的一些最小差异。此外,据参与者报告,这样做可以使管制员的工作量平均减少 45%。由于可以使用多种控制策略,因此考虑航空公司的运营成本对于选择可能使管制员和航空公司都受益的最佳策略非常重要。此外,

HU6UST JS81 - 空战司令部
在计划的出击增多期间,F-4 中队因天气原因暂停飞行。在预定起飞时间 1 小时 25 分钟后,机组人员终于抵达了飞机。他们和机组长都知道,他们必须在 35 分钟内起飞,以避免延误计划。然后,飞行员注意到紧急刹车蓄能器的读数为 3,000 psi。他要求机组长给系统放气。机组长拉动紧急刹车手柄并踩刹车,直到飞行员告诉他压力表为 1,000 psi。机组长爬出驾驶舱,未能重置刹车手柄。飞行员完成了飞行前检查,启动飞机,滑行到准备区域,然后才意识到紧急刹车手柄已被拉动。他将手柄放回插座中,并向 WSO 提及快速检查机组人员必须重置刹车。他们现在有 8 分钟的时间起飞而不会出现计划偏差。他们忘记了刹车,因为他们专注于准时起飞。他们准时起飞。当他们返回着陆时,跑道是湿的。接地后,飞行员施加了重刹车,希望防滑装置能起作用;相反,两个轮胎都爆裂了。飞行员让 F-4 保持在跑道上,将损坏限制在轮胎和机轮上。

按轨迹管理的运营概念
本文档介绍了“按轨迹管理” (MBT),这是未来空中交通管理 (ATM) 的一个概念,其中每个航班都按照四维轨迹 (4DT) 运行,该轨迹由空域用户和联邦航空管理局 (FAA) 协商确定,以尊重空域用户的目标,同时遵守国家空域系统 (NAS) 的限制。在当今的 NAS 中,ATM 系统尝试根据批准的飞行计划和预定或控制的起飞时间预测每个航班的轨迹。但是,一旦飞机开始移动,管制员就会对飞机进行战术管理,以实施交通管理限制、分离原本有冲突的飞机并解决出现的 NAS 限制。战术管制员的行动不会直接传达给自动化系统或其他利益相关者。此外,初始轨迹预测不会预测这些中断或它们将如何影响飞行。因此,再加上所需数据和模型的差距,轨迹预测的准确性低于可能的水平,从而影响交通流量管理 (TFM) 的性能。 MBT 概念的基石是,所有飞行器始终具有从其当前状态到其目的地的指定 4DT。这些指定轨迹由轨迹约束和描述组成。飞行员和空中交通管制员在自动化的帮助下操作飞机以遵守指定