XiaoMi-AI文件搜索系统
World File Search System路线

添加摩擦搅拌沉积:变形处理路线Tometal添加剂制造
经典的金属制造和连接涉及两种不同的途径:一条基于熔化和结合;其他利用塑性变形。要用所需的几何形状制造金属组件,配偶工程师可以加热并融化金属,将其倒入具有预定层形状的模具中,然后通过冷却使其在模具中凝固。这是铸造过程[1]。替代,当金属保留在固态中时,可能会将金属按或将金属锤成所需的形状。这是锻造过程[2]。在铸造更能产生较大且复杂的形状时,宽容会导致改善的机械性能,例如更好的延展性,更高的产量和拉伸强度以及较长的疲劳寿命。加入两个金属工件,材料工程师可以使用弧[3],煤气
结合贝叶斯优化和自动化以同时优化反应条件和路线
使用基于OW的反应器来优化Suzuki - Miyaura耦合(3个连续变量,一个分类)和C - H激活(5个连续变量)通过5 - 22实验中的多任务BO进行,从而降低了与常规优化技术相比,R&D成本降低了R&D的成本。在一项不同的研究中,使用BO技术来提高基于4个输入控制变量(例如居住时间,等效量和温度)参数的自动连续OW平台,在OW系统中的HECK环化34个34的产量。作者能够在仅14小时(13个总实验)中实现81%的产量,并发现了有利的竞争途径。这样的ndings强调了BO在不同的研发方案中的多功能性和效力。将BO方法纳入研发方法的一个主要挑战是,这些方法通常被视为具有有限的解释性和可解释性的黑匣子,35妨碍了他们广泛采用。此外,当搜索空间很大时,研究人员在可视化和

了解现实世界中的路线来源验证(ROV)部署,以及为什么不遵循Manrs Action 1
摘要 - BGP劫持是对路由安全性最重要的威胁之一。为了提高域间路由的可靠性和可用性,为防御BGP劫持做出了许多工作,并且路线起源验证(ROV)已成为当前的最佳实践。但是,尽管相互同意的路线安全性规范(MANRS)一直鼓励网络运营商至少验证其客户的宣布,但最近的研究表明,许多网络仍然没有完全部署ROV或传播对客户的非法公告。要了解现实世界中的ROV部署,以及为什么网络运营商不遵循Manrs提出的行动,我们对ROV部署进行了长期测量,并进一步发现,许多不合格的网络只能在客户界面的一部分,或提供者或同伴接口处部署ROV。然后,我们提出了第一个通知实验,以研究通知对ROV修复的影响。但是,我们的分析表明,没有任何通知处理具有重大影响。之后,我们在网络运营商之间进行了一项调查,发现经济和技术问题是不合规的两个主要原因。寻求现实的ROV部署策略,我们进行了大规模的模拟,令我们惊讶的是,发现不遵循Manrs Action 1可以更好地防御前缀劫持。最后,有了我们所有的发现,我们提供了实用的建议,并概述了未来的指示,以帮助促进ROV部署。

基于最优觅食理论的路线优化研究以可再生资源为目标的移动水产养殖系统
摘要:水产养殖系统需要仔细考虑位置,因为位置决定了水质、污染影响和危险情况。移动性可能能够解决这些因素,同时还支持全年使用风能、波浪能和太阳能等可再生能源。本文以专门建造的移动式水产养殖船为例,结合可再生能源收集能力对其进行建模,以评估利用高可再生能源潜力为水产养殖作业提供动力的潜在好处。创建并调整了路线优化算法以模拟水产养殖平台的移动性,并与固定系统进行了成本基础比较。当结合多种资源时,可再生能源潜力的空间变化很小,这严重限制了移动式、可再生能源水产养殖系统的好处。另一方面,通过混合多种可再生能源(装机风电容量13千瓦、装机太阳能661平方米、特征宽度1米的波浪能转换器)持续收集能源表明,可以在不显著增加能源收集器成本的情况下实现移动平台对近海水产养殖的潜在益处(减轻环境和社会问题、对产量产生潜在的积极影响、避免危害等)。

解决飞机路线和排序问题时人类的表现和策略:一种实验方法
摘要 随着机场资源不断扩展以满足日益增长的服务需求,有效利用地面基础设施对于确保运营效率越来越重要。运筹学研究已经产生了一些算法,为机场塔台管制员提供有关航班到达、离开和地面移动的最佳时间和顺序的指导。虽然这种决策支持系统有可能提高运营效率,但它们也可能影响用户的心理工作量、态势感知和任务绩效。这项工作旨在确定人类决策者在实验性机场地面移动控制任务中采用的绩效结果和策略,目的是确定增强以用户为中心的塔台管制决策支持系统的机会。为了应对这一挑战,30 名新手参与者解决了一组以游戏形式呈现的车辆路线问题,代表跑道管制员执行的机场地面移动任务。游戏在两个独立变量上有所不同,即网络地图布局(代表任务复杂性)和游戏目标(代表任务灵活性),而口头协议、视觉协议、任务表现、工作量和任务持续时间则被收集为因变量。逻辑回归分析显示,游戏目标和任务持续时间显著影响参与者确定游戏最佳解决方案的可能性,其中

orca-a*:一种混合相互碰撞的回避和路线计划算法在密集的城市地区
摘要 - 无人机(或无人空中系统)的快速发展及其在城市地区的潜在部署带来了许多安全问题。一定程度的自动化对于确保在城市环境中安全有效执行的UAS任务很可能是必要的。在大量不合作,非交流的UA会在密集的城市地区飞行,自然而然地想到的分散和自动方法。在这种方法中,每个代理都会在建筑物之间导航,同时避免其他流量。orca(最佳的相互碰撞避免)是一种最新的机器人碰撞避免使用方法,可以用作检测并避免在板上UAS上进行逻辑。最初是为自动机器人的2D运动而设计的,需要进行一些适应才能以应用于城市环境中的飞行物体。特别是,ORCA是一种短期避免碰撞,不是为复杂的城市环境中的路径规划而设计的。在这项研究中,我们引入了一种混合方法,将Orca与A ∗路径平面算法相结合,并表明Orca- A ∗

纳米结构的金属氧化物@碳点通过顺序的壳聚糖模板和碳化路线
神经医学和肌肉障碍系,医学中心 - 弗雷堡大学,弗雷堡大学,弗雷堡,德国B神经肌肉中心,儿科和青少年医学系,维也纳,维也纳,奥地利C clinic favoriten

V2G能源网络中电动汽车的联合路线选择和充电排放计划
摘要 - 感谢二氧化碳的优势,预计有望继续增加。通常,它们通过由电网或可再生工厂提供动力的充电站进行充电。由于电网和可再生工厂之间电力价格的潜在差异,EV可能会在由可再生工厂提供动力的充电站购买电力,然后将电池中的盈余能量拆除到网格中,以获得利用并增强了整体可再生能源利用。在这项工作中,我们旨在优化路线的选择和充电/排放计划,以提高电动汽车的整体经济利益,并考虑到限制,包括由可再生能源的间歇产生引起的时间变化的能源供应,可再生能源的电源,充电站的充电堆和电动汽车的旅行延迟可容纳。首先,时间扩展的车辆到网格图旨在对目标和相关的约束进行建模。然后,我们将基于AI的A*算法应用于每个EV的k-差路径。最后,提出了一种联合路由选择和充电/放电算法,即,k-毛病路径 - 界路由路由 - 安排套件(KSP-JRS)提议通过在时间约束下从能量排放中最大化其收入来最大化电动汽车的总成本。使用TherealTraffimaParoundSantaclara,加利福尼亚州进行了评估。该研究具有不同数量的测试EV,显示了所提出算法的可行性和优越性。
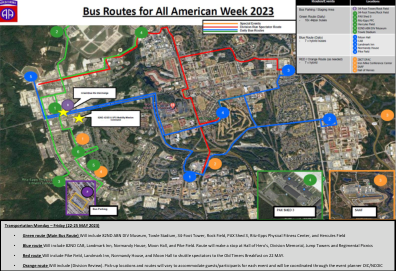
星期五 (2023 年 5 月 22 日至 25 日) • 绿色路线(主要巴士...
• 橙色路线将包括(部门审查)。接送地点和路线将有所不同,以适应每个活动的客人/参与者,并将通过活动策划人 OIC/NCOIC 进行协调
内政部 – 安全合法路线报告 – 2023 年非法移民法案(第 61 条)
为了给地方当局、社区和难民提供更清晰和确定的信息,我们将在与地方当局协商的基础上,对通过安全合法途径抵达的人数设定上限。首次协商旨在设定通过安全合法途径抵达的人数上限,于 2023 年 10 月 20 日启动,并于 2023 年 1 月 9 日结束。协商寻求英国所有地方当局的回应。这样我们才能真实地了解英国接纳、融合和安置重新安置的难民的能力。只有确定现实的容量状况,英国才能继续运营安全合法的保护路线,并确保这些路线成为管理良好且可持续的移民系统的一部分。本报告中包含的路线不一定包括在上限内。这将在设定上限时通过法规规定。