XiaoMi-AI文件搜索系统
World File Search System车道

收获车道资产管理绝对退货基金
在本PDS中将IDP的操作员称为“ IDPS运算符”,而IDPS的披露文档称为“ IDPS指南”。如果您通过国内流离失所者进行投资,则您的权利和债务将受《国内流离失所者指南》的条款和条件管辖。间接投资者应在投资基金之前仔细阅读IDP指南。间接投资者应注意,他们指示IDPS运营商安排代表他们投资于基金的资金。间接投资者除了访问股票受托人的投诉解决过程之外,没有成为基金的单位持有人或拥有单位持有人的权利(请参阅第8节)。IDPS运营商成为基金的单位持有人,并获得了这些权利。根据管理IDP的安排,国内流离失所者可以行使或拒绝按间接投资者行使权利。间接投资者应参考其IDP指南,以获取有关其作为间接投资者的权利和责任的信息,包括有关适用于其投资的任何费用和费用的信息。有关间接投资者如何申请基金单位(包括适用的申请表)的信息也将包含在IDPS指南中。股票受托人对IDP运营商或国内流离失所者运营商的任何失败不承担任何责任,以向间接投资者提供股票受托人提供的当前版本的此PDS,或者在股票受托人的要求时向PDS撤回PDS。

在更改的快车道中简化它
IT团队定期评估技术领域以及正在范围内调整其方法的内容。这些专业人员不满足于他们的组织,他们只是想设定步伐。JumpCloud的Q1 2025 IT趋势报告,从混乱到控制:在变化的快车道中简化它,深入研究IT团队如何征服这些挑战并选择对混乱的控制。从确保各种设备生态系统到平衡AI创新与谨慎的平衡,该报告强调了管理员正在采用的方法来简化它并保持领先地位。

twinlitenet+实时可驱动区域和车道分割的更强模型
结合了标准和深度可分离的扩张卷积,降低了复杂性,同时保持了高度的准确性。它有四种配置,从强大的194万参数Twinlitenet +大到超轻量级34K参数Twinlitenet + Nano。值得注意的是,TwinliteNet +大的达到了92.9%的MIOU(平均交叉路口),用于驱动面积分割,而车道分割的34.2%IOU(与联合的交集)为34.2%。 这些结果实现了能力的性能,超过了当前的最新模型,而仅需少11倍的浮点操作(FLOP)才能计算。 在各种嵌入式设备上进行了严格评估,TwinliteNet +表现出了有希望的LASCENCE和功率效率,从而强调了其对现实世界自动驾驶汽车应用的潜力。 该代码可在https://github.com/chequanghuy/twinlitenetplus上找到。达到了92.9%的MIOU(平均交叉路口),用于驱动面积分割,而车道分割的34.2%IOU(与联合的交集)为34.2%。这些结果实现了能力的性能,超过了当前的最新模型,而仅需少11倍的浮点操作(FLOP)才能计算。在各种嵌入式设备上进行了严格评估,TwinliteNet +表现出了有希望的LASCENCE和功率效率,从而强调了其对现实世界自动驾驶汽车应用的潜力。该代码可在https://github.com/chequanghuy/twinlitenetplus上找到。

使用改良过度Feat CNN的实时车辆和车道检测:一项关于自动驾驶中鲁棒性和性能的全面研究
|摘要该检查研究了使用深刻学习方法的使用,即明确利用卷积脑组织(CNN),以持续识别道路驾驶情况中的车辆和路径限制。该研究通过利用一个包括由各种传感器捕获的注释帧,包括相机,激光雷达,雷达,雷达和GPS捕获的带注释的框架,调查了对CNN体系结构的修改性能。该框架在识别车辆和预期3D的路径形状方面表现出诚意,同时在不同的GPU设置上完成10 Hz以北的功能率。车辆边界盒预测具有很高的精度,对遮挡的阻力和有效的车道边界识别是关键发现。安静,探索强调了该框架在独立驾驶空间中的可能物质性,为该领域的未来改进带来了有前途的道路。

经济状况:重回快车道
2024 年,全球经济呈现稳定但不均衡的增长。一个值得注意的趋势是,由于供应链中断和外部需求疲软,全球制造业(尤其是欧洲和亚洲部分地区)放缓。相比之下,服务业表现更好,支撑了许多经济体的增长。大多数经济体的通胀压力有所缓解。然而,服务业通胀仍然持续存在。尽管大宗商品价格已经稳定下来,但同步价格上涨的风险仍然存在。由于各经济体的增长情况不一,最后一英里的通货紧缩被证明难以解决,各国央行可能会制定不同的货币宽松路径。这将导致未来政策利率和通胀轨迹的不确定性。除此之外,地缘政治紧张局势、持续的冲突和贸易政策风险继续对全球经济稳定构成重大挑战。

华盛顿街西行新自行车道入口令自行车骑行者担忧
在虚拟信息发布会上了解有关灭鼠的知识。城市检查服务部和 SomerViva 移民事务办公室邀请社区成员于 1 月 9 日星期四下午 5 点至 6 点通过 Zoom 在线参加关于灭鼠的虚拟研讨会。与会者将了解如何识别您的财产中是否有老鼠、灭鼠方法、预防技巧以及可以提供帮助的城市资源。将提供西班牙语翻译。立即访问 somervillema.gov/rodentsaway 了解更多信息并参加或获取技巧。 **************************** 无法参加城市中期仪式和演讲的社区成员可以通过 CityTV 的 YouTube 频道在线观看,网址为 youtube.com/SomervilleCityTV **************************** 本周祝几位当地人生日快乐:祝 Ka- tie McDaid 生日快乐。我们祝她生日快乐。祝退休高中教师 Marion Joyce 生日快乐。我们希望她能享受这一天。祝伟大的摄影师 Ken Kotch 生日快乐。我们希望他能度过愉快的一天。祝 Phil Forsyth 生日快乐,我们祝他一切顺利。祝伟大的人 Matt Hoey 生日快乐。我们祝他和家人度过愉快的一天。祝 Donna Desrescente 生日快乐。我们祝她一切顺利。我们祝我们所有的 Facebook 朋友,如 Linda M. Alves、Rose Amabile、Chris Walsh、Alberta Healey、Janice Burpee、Paul Nunziato 和 Suzanne Ryan Marks 生日快乐。我们希望每个人都有美好的一天。继续第 7 页

撞车避免车道出发碰撞
测试实验室的责任是确保任何要求的更改满足欧元NCAP的要求。如果实验室和制造商之间存在分歧,则应立即告知欧元NCAP秘书处以通过最终判决。实验室工作人员怀疑制造商干扰了任何设置,应警告制造商的代表,他们不允许自己这样做。还应告知他们,如果发生另一次事件,他们将被要求离开测试地点。
感知有助于计划:促进多阶段车道 -
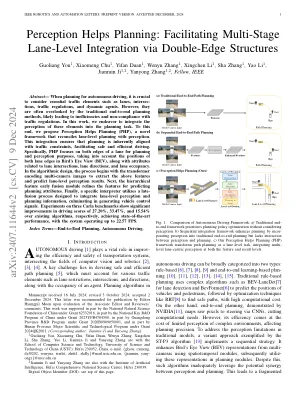
摘要 - 在计划自动驾驶时,要考虑基本的交通元素,例如车道,相互作用,交通法规和动态代理,这一点至关重要。但是,他们经常被传统的端到端计划方法所忽视,这可能导致效率低下和不遵守交通法规。在这项工作中,我们努力将这些元素的感知整合到计划任务中。为此,我们提出了感知有助于计划(PHP),这是一个新颖的框架,可将车道级别的计划与知觉调和。此集成确保计划本质上与流量限制一致,从而促进安全有效的驾驶。具体来说,PHP考虑了两条车道边缘在Bird's Eye View(BEV)中的位置,以及与车道交叉路口,车道方向和车道占用相关的属性。在算法设计中,该过程始于编码多相机图像的变压器以提取上述特征并预测车道级别的感知结果。接下来,分层功能早期融合模块完善了预测计划属性的功能。最后,一个特定的解释器利用了一个晚期融合过程,旨在整合车道级别的感知和计划信息,最终导致生成车辆控制信号。在三个CARLA基准上进行的实验显示,与现有算法分别达到27.20%,33.47%和15.54%的驾驶得分的显着提高,分别实现了最新性能,系统运行高达22.57 fps。

212 号法案自行车道框架的影响
本报告所含建议不会产生任何财务影响。本报告包含省政府提议的在布鲁尔街、央街和大学大道或部分路段安装和可能拆除自行车道的成本估计财务影响的初步摘要。报告承认市政府投资约 2700 万美元在这些街道上安装现有自行车道基础设施。此外,报告估计拆除布鲁尔街、央街和大学大道的自行车道并代之以机动车道的成本约为 4800 万美元。鉴于正在考虑的拟议立法变更是近期的,本报告所含的估计只是初步的(数量级),有待进一步审查和完善。首席财务官和财务主管已审查了本报告并同意财务影响部分中提供的信息。

Emacros 车道警报器用户手册
为传感器选择一个距离地面约 4.5-6 英尺的位置,可以清晰地看到您想要监控的区域,避免阳光直射和附近的植被。使用附带的螺丝将其安装,向下倾斜以获得更好的检测效果。如果您喜欢便携式设置,请插入接收器或插入 4 节 AA 电池(不包含在内)。按住“区域”按钮直到 LED 闪烁,将传感器与接收器配对,然后通过在传感器前面挥动手来触发传感器。接收器将发出哔哔声以表示成功。对于多个传感器,对每个传感器重复此过程。使用底部的开关调整传感器的灵敏度:高模式(30 英尺范围)或低模式(20 英尺范围)。按下接收器上的“音调”按钮从 4 个选项中选择一个铃声。通过将传感器的灵敏度调整为低模式来解决误报问题,确保其安装正确且没有阳光直射。如果传感器不工作,请使用太阳能电池板或 DC5V 电源适配器为其充电;如果蓝灯不亮或持续闪烁,请联系客户支持进行更换。常见问题包括间歇性检测,可通过确保传感器安装正确并向下倾斜来解决。如有其他问题,请参阅用户手册或通过电子邮件联系客户支持。常见问题解答:* 传感器的检测范围是多少?高模式下最多 30 英尺,低模式下最多 20 英尺。* 传感器和接收器之间的无线范围是多少?理想条件下最远可达 1/2 英里(1500 英尺),障碍物可能会缩短。* 我可以将多个传感器与一个接收器一起使用吗?是的,一个接收器最多可配对 4 个传感器。* 传感器防水吗?是的,它具有 IP65 防水等级,可以承受各种天气条件。* 我需要更换传感器中的电池吗?不,传感器由可充电锂离子电池供电,由太阳能电池板或 DC5V 电源适配器充电。由于附带了快速入门指南,抗运动传感器和检测器-安全警报系统的设置只需几分钟。在大多数情况下,该系统的无线范围约为 1500 英尺,可实现传感器和接收器之间的无缝通信。该传感器由太阳能供电,无需更换电池,使用由内置太阳能电池板充电的可充电锂离子电池。该传感器设计可靠,可通过可调节的灵敏度设置最大限度地减少误报。您可以将多个接收器与一个传感器一起使用,但建议设置单独的传感器以获得最佳性能。该系统在夜间有效工作,利用红外技术检测运动。我们的公司 eMACROS 致力于提高客户满意度,提供卓越的支持并及时解决任何产品问题。如果您有任何问题或疑虑,请通过 [Macross.service@outlook] 与我们联系。com](mailto:Macross.service@outlook.com)。为了获得最佳的车辆检测效果,请将传感器安装在距离道路 0-30 英尺高约 4 英尺的位置,并与汽车发动机保持水平角度。请注意,传感器在 -4F 至 140F 度的温度范围内工作效果最佳。给出文章文本此处将 PIR 传感器开关设置为高灵敏度 seng。要检测车辆,PIR 传感器会检测带有热源的运动。请将传感器眼与汽车发动机保持水平角度。旋转传感器以获得最佳的车辆视线。系统发出错误警报。检查传感器窗口中是否有移动的树枝或昆虫,并根据需要移除。检查 PIR 月亮传感器(组装和 Seng)上的传感器开关。确保阳光没有直接照射到传感器眼上。系统未达到预期的传输范围。确保 PIR 月亮传感器垂直对齐,不靠在树的远侧,并远离金属物体。确保 Base Staon 与传感器之间的视线尽可能清晰。设备之间的物体越少,范围越长。不再享受保修的产品不予退款。如果损坏或故障是由天灾、滥用、事故、误用或未遵循说明造成的,则保修不涵盖更换。同样不涵盖的还有卖方服务范围之外的维修、保险丝和电池等消耗品、外观损坏、运输成本以及产品拆卸或安装费用。我们的目标是让您在 Hosmart 拥有良好的体验。我们感谢您对我们或我们产品的体验的任何方面的反馈。请在留下在线评论之前与我们联系,以便我们解决您可能存在的任何问题。我们保证您对此次交易感到满意。我们的办公时间为周一至周五上午 9:00 至下午 5:00(GMT+8)。周六、周日和公共假期办公室关闭,这可能会导致这些时间回复延迟。本设备已经过测试,符合 B 类数字设备的 FCC 规则。它会产生并辐射射频能量。如果安装不正确或未按照说明使用,可能会对无线电通信造成干扰。但是,无法保证任何安装都不会发生干扰。如果此设备对无线电或电视接收造成有害干扰,建议用户尝试通过重新调整接收天线、增加设备与接收器之间的距离或更改电路来解决问题。用户也可以咨询经销商或经验丰富的技术人员寻求帮助。本设备符合 FCC 规则第 15 部分,但须遵守两个条件:它不得造成有害干扰,并且必须接受任何接收到的干扰。未经责任方批准的任何更改或修改都可能导致用户无权操作本设备。本产品由 Macross Microelectronics (HK) 制造。进行调整时,关闭基站电源会将音量重置为出厂设置。使用 PIR 传感器检测到运动时,区域/线路 LED 指示灯将闪烁。电池充满电后,PIR 运动传感器上的蓝灯将熄灭。注意:传感器已在工厂经过多次测试。如果蓝灯不亮,则电池可能已充满电,您可以直接安装。高/低/关开关:首先,打开 PIR 运动传感器底部的黑色硅胶密封盖,然后通过切换到高或低来打开传感器。将检测范围设置为高(30 英尺)、低(20 英尺),或关闭传感器。注意:通过将传感器的灵敏度调整为“低”,可以最大限度地减少误报。CH 1-4 开关:为每个外部传感器选择不同的通道。如果安装多个 PIR 运动传感器,请确保每个传感器都设置为不同的通道/区域。注意:每个独立通道使用独特的铃声,您可以将不同的铃声与不同的通道匹配。通过在传感器前挥动手来测试 PIR 运动传感器。基站将根据传感器的设置发出独特的音调。基站:a. 将 Micro USB 电缆连接到基站上的 USB 端口,以使用交流适配器供电。b. 基站还可以使用 4 节 AA 电池运行长达 2 周,以备断电时使用。当检测到运动时,传感器眼仅在分配到线路 1 和 2 时才会闪烁红色,而不是线路 3 或 4。低电量提示:1. 当传感器电池电量不足时,基站会说“通道 #1/2/3/4 电量低,请充电”,相应的传感器区域/线路 LED 指示灯将闪烁。2. 当基站电池电量不足时,红色电源 LED 指示灯将闪烁。安装板:球形接头调节螺钉(背面)传感器眼交流适配器输入微型 USB 端口太阳能电池板防水插头请勿将设备安装在对电磁辐射敏感的区域,如医院、机场或建筑工地。这包括在医疗设施、飞机或爆破区附近使用它。通过将传感器的灵敏度调整为“低”,可以最大限度地减少误报。CH 1-4 开关:为每个外部传感器选择不同的通道。如果安装多个 PIR 运动传感器,请确保每个传感器都设置为不同的通道/区域。注意:每个单独的通道使用独特的铃声,允许您将不同的铃声与不同的通道匹配。通过在传感器前挥动手来测试 PIR 运动传感器。基站将根据传感器的设置发出独特的音调。基站:a. 将 Micro USB 电缆连接到基站上的 USB 端口,以使用交流适配器供电。b. 基站还可以使用 4 节 AA 电池运行长达 2 周,以防断电时备用。检测运动时,传感器眼仅在分配到线路 1 和 2 时才会闪烁红色,而不是线路 3 或 4。低电量提示:1. 当传感器电池电量低时,基站会说“通道 #1/2/3/4 电量低,请充电”,相应的传感器区域/线路 LED 指示灯将闪烁。2. 当基站电池电量低时,红色电源 LED 指示灯将闪烁。安装板:球头调节螺丝(背面)传感器眼交流适配器输入 Micro USB 端口太阳能电池板防水插头请勿将设备安装在对电磁辐射敏感的区域,如医院、机场或建筑工地。这包括在医疗设施、飞机或爆破区附近使用它。通过将传感器的灵敏度调整为“低”,可以最大限度地减少误报。CH 1-4 开关:为每个外部传感器选择不同的通道。如果安装多个 PIR 运动传感器,请确保每个传感器都设置为不同的通道/区域。注意:每个单独的通道使用独特的铃声,允许您将不同的铃声与不同的通道匹配。通过在传感器前挥动手来测试 PIR 运动传感器。基站将根据传感器的设置发出独特的音调。基站:a. 将 Micro USB 电缆连接到基站上的 USB 端口,以使用交流适配器供电。b. 基站还可以使用 4 节 AA 电池运行长达 2 周,以防断电时备用。检测运动时,传感器眼仅在分配到线路 1 和 2 时才会闪烁红色,而不是线路 3 或 4。低电量提示:1. 当传感器电池电量低时,基站会说“通道 #1/2/3/4 电量低,请充电”,相应的传感器区域/线路 LED 指示灯将闪烁。2. 当基站电池电量低时,红色电源 LED 指示灯将闪烁。安装板:球头调节螺丝(背面)传感器眼交流适配器输入 Micro USB 端口太阳能电池板防水插头请勿将设备安装在对电磁辐射敏感的区域,如医院、机场或建筑工地。这包括在医疗设施、飞机或爆破区附近使用它。