机构名称:
¥ 1.0
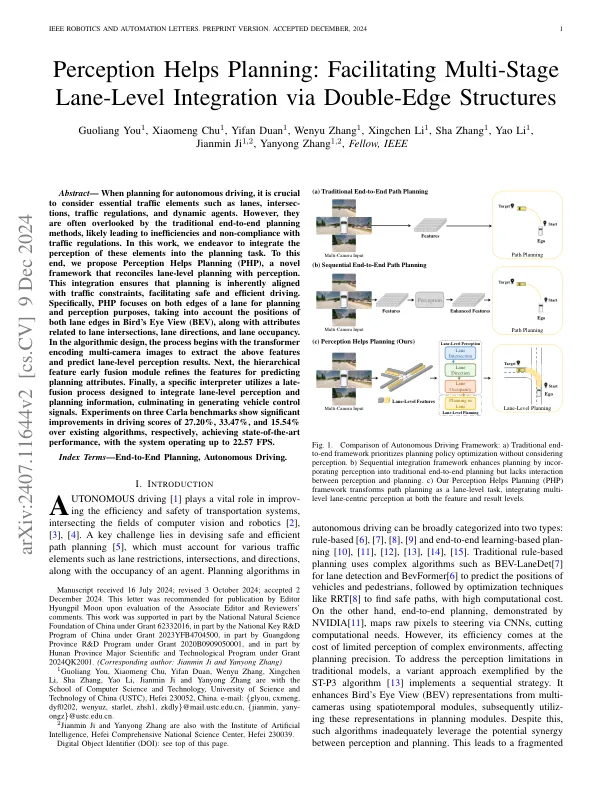
摘要 - 在计划自动驾驶时,要考虑基本的交通元素,例如车道,相互作用,交通法规和动态代理,这一点至关重要。但是,他们经常被传统的端到端计划方法所忽视,这可能导致效率低下和不遵守交通法规。在这项工作中,我们努力将这些元素的感知整合到计划任务中。为此,我们提出了感知有助于计划(PHP),这是一个新颖的框架,可将车道级别的计划与知觉调和。此集成确保计划本质上与流量限制一致,从而促进安全有效的驾驶。具体来说,PHP考虑了两条车道边缘在Bird's Eye View(BEV)中的位置,以及与车道交叉路口,车道方向和车道占用相关的属性。在算法设计中,该过程始于编码多相机图像的变压器以提取上述特征并预测车道级别的感知结果。接下来,分层功能早期融合模块完善了预测计划属性的功能。最后,一个特定的解释器利用了一个晚期融合过程,旨在整合车道级别的感知和计划信息,最终导致生成车辆控制信号。在三个CARLA基准上进行的实验显示,与现有算法分别达到27.20%,33.47%和15.54%的驾驶得分的显着提高,分别实现了最新性能,系统运行高达22.57 fps。
感知有助于计划:促进多阶段车道 -
主要关键词

相关文件推荐